Linux 内核分析

| 学院 | 计算机与通信工程学院 |
|---|---|
| 专业 | 计算机科学与技术 |
| 班级号 | 200523 |
| 学号 | 202012143 |
| 姓名 | 熊舟桐 |
Linux 基本命令
实验环境
本地 Linux 版本:Manjaro
Linux northboat-nhx0dbde 6.1.12-1-MANJARO #1 SMP PREEMPT_DYNAMIC Tue Feb 14 21:59:10 UTC 2023 x86_64 GNU/Linux
ssh 版本
OpenSSH_9.2p1, OpenSSL 3.0.8 7 Feb 2023
目标机版本:Debian
Linux VM-0-17-debian 5.10.0-19-amd64 #1 SMP Debian 5.10.149-2 (2022-10-21) x86_64 GNU/Linux
实验内容
ssh 连接 Linux
在manjaro上连接debian服务器
ssh root@43.163.218.127
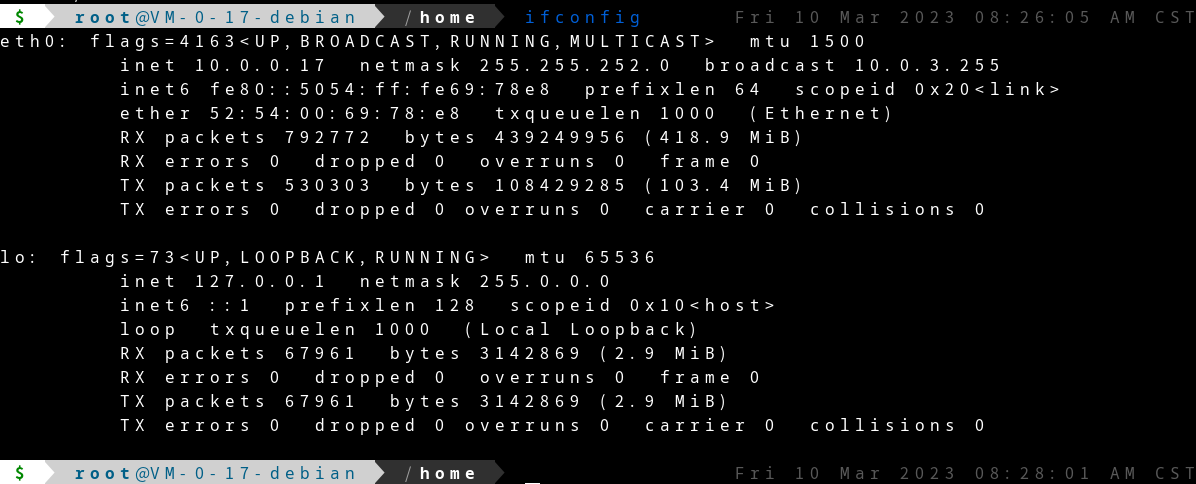
查看主机基本信息

查看网卡信息
文件管理命令
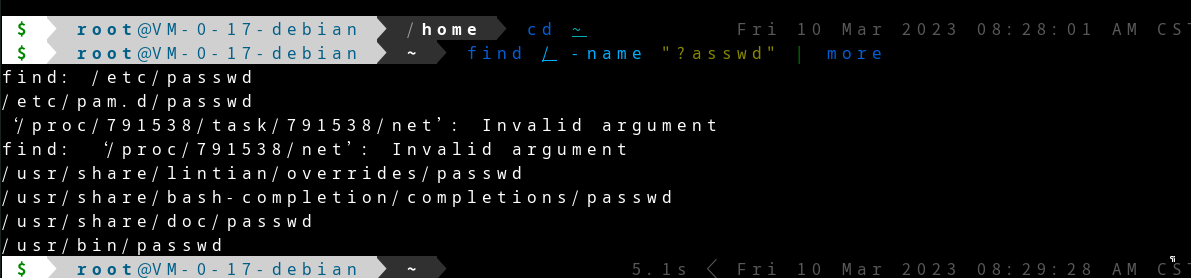
搜索文件
查看文件内容
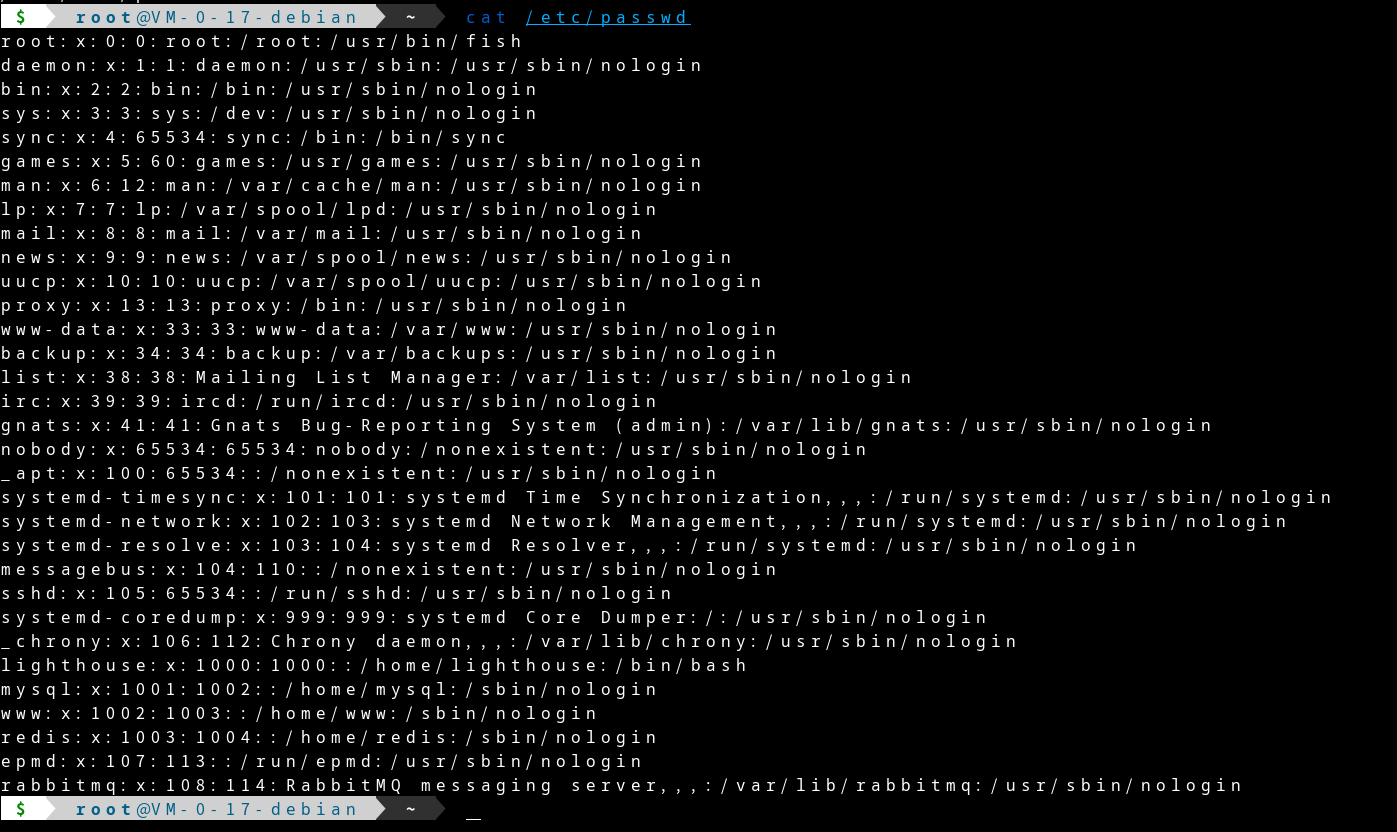
通过管道过滤查找关键字

创建目录

创建文本文件

编辑文件

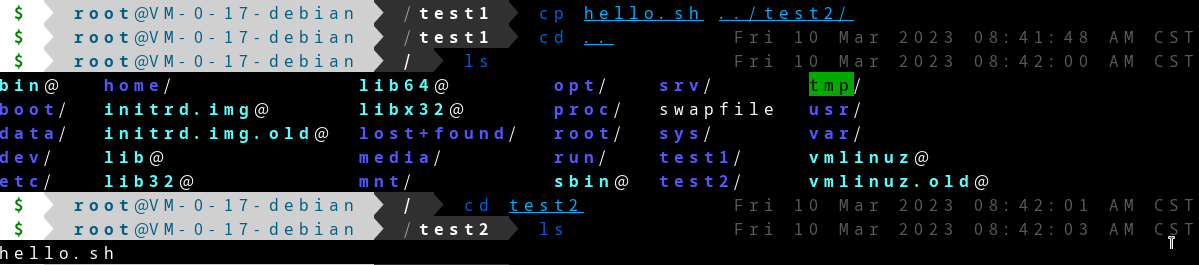
复制文件
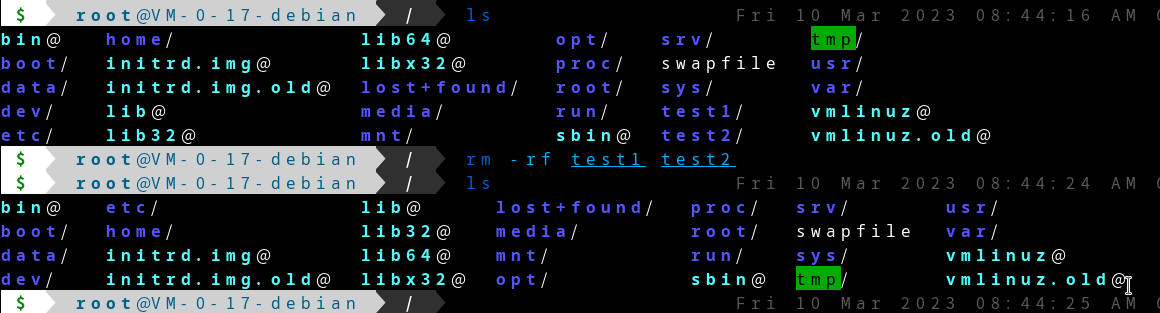
删除文件

删除目录
用户管理
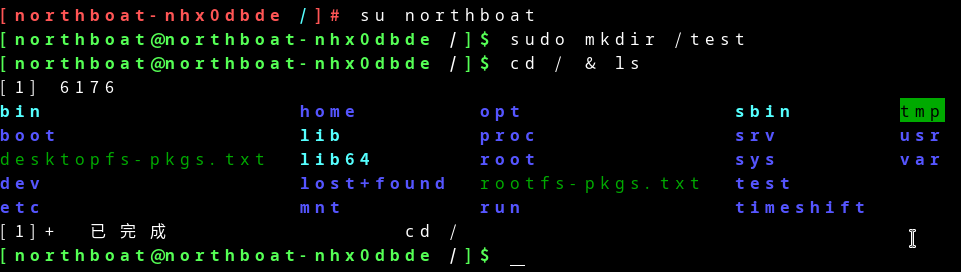
新建用户

切换并测试用户

修改用户权限

查看用户组
删除用户

文件解压缩
压缩文件.tar

解压文件

压缩文件.tar.gz

解压文件

实验总结
debain 默认没有 wheel 组,在加入用户进 wheel 组时会报错:group wheel does not exist
需要新增组
groupadd wheel
再将用户加入组
usermod -a -G wheel northboat
删除组
groupdel wheel
通过查看组cat /etc/group发现存在root组,将用户加入root组
usermod -a -G root northboat
Linux 系统管理
实现环境
Linux 版本:Manjaro
Linux northboat-nhx0dbde 6.1.12-1-MANJARO #1 SMP PREEMPT_DYNAMIC Tue Feb 14 21:59:10 UTC 2023 x86_64 GNU/Linux
本地 Shell
实验内容
网络管理
设置静态 IP,manjaro 下,使用 netctl 实现
下载 netctl
yay -S netctl
查看网卡信息
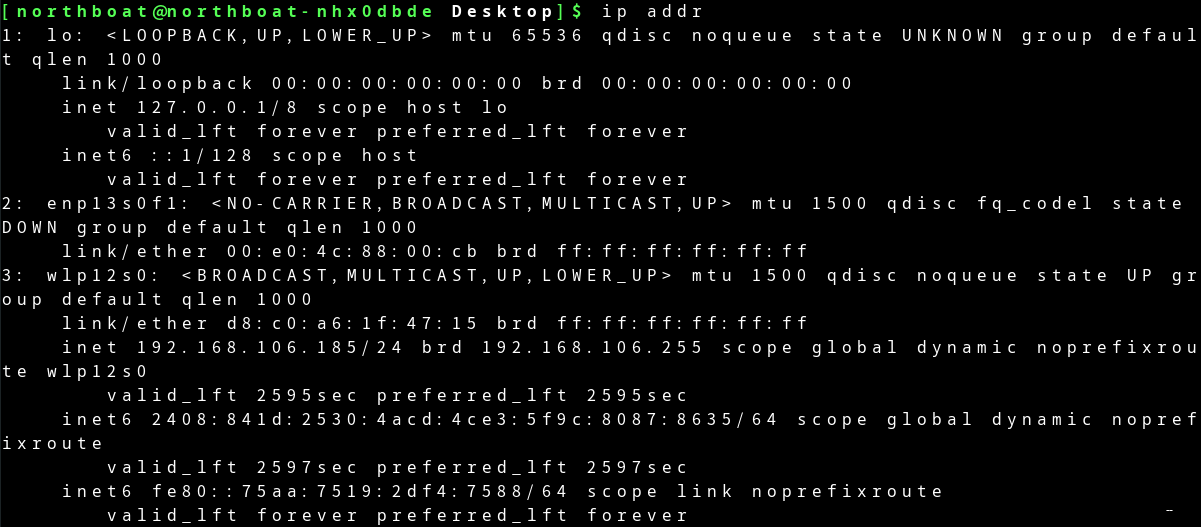
得知网卡名称wlp12s0
终止网络服务
sudo systemctl stop NetworkManager
sudo systemctl disable NetworkManager
2
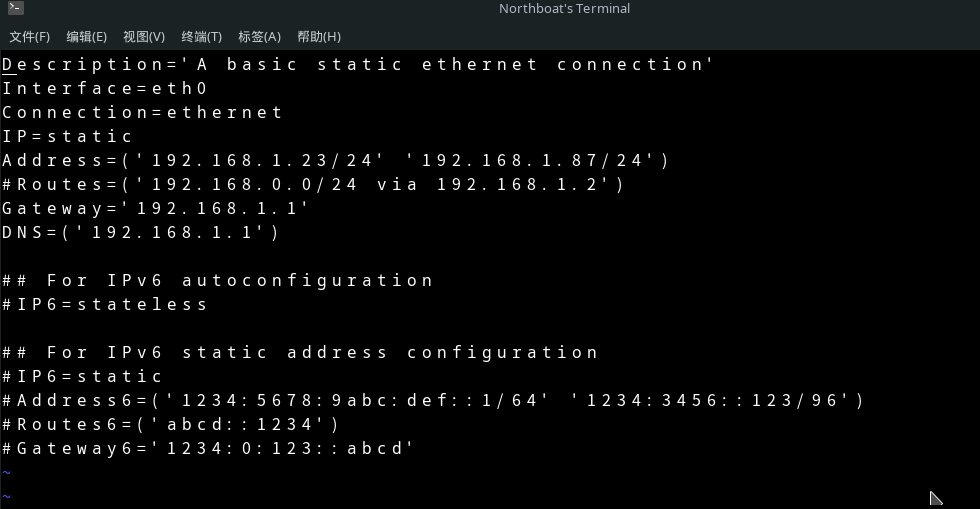
复制netctl默认配置文件
sudo cp /etc/netctl/examples/ethernet-static /etc/netctl/enp13s0f1
编辑文件wlp12s0
配置 DNS 解析

重启网络服务
sudo systemctl start NetworkManager
sudo systemctl enable NetworkManager
2
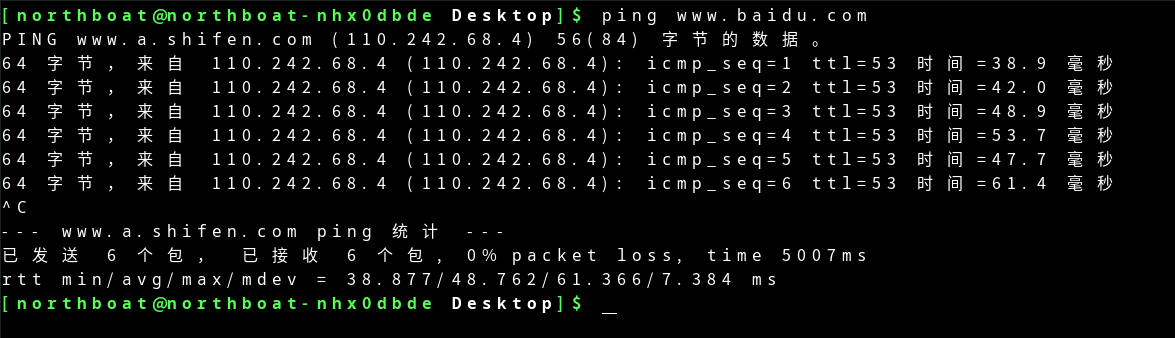
查看网络连接状态
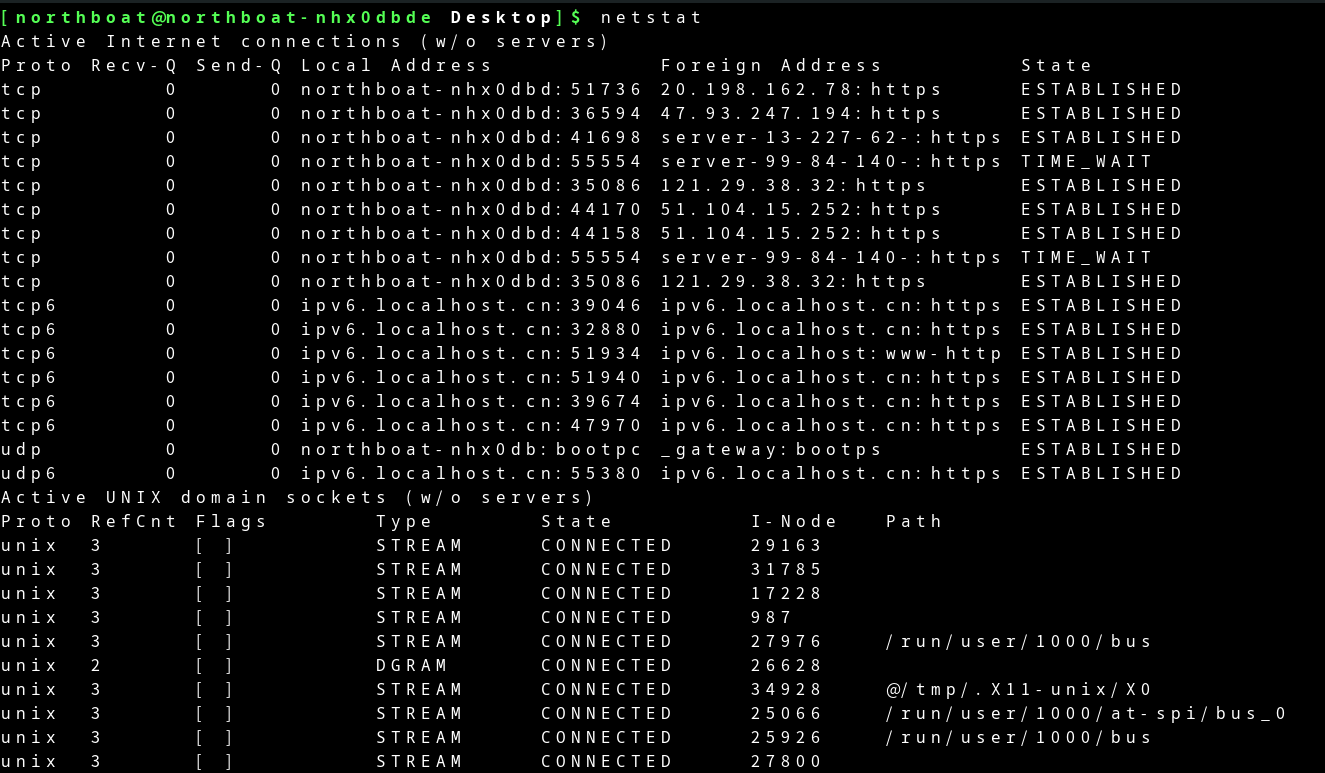
ping 通
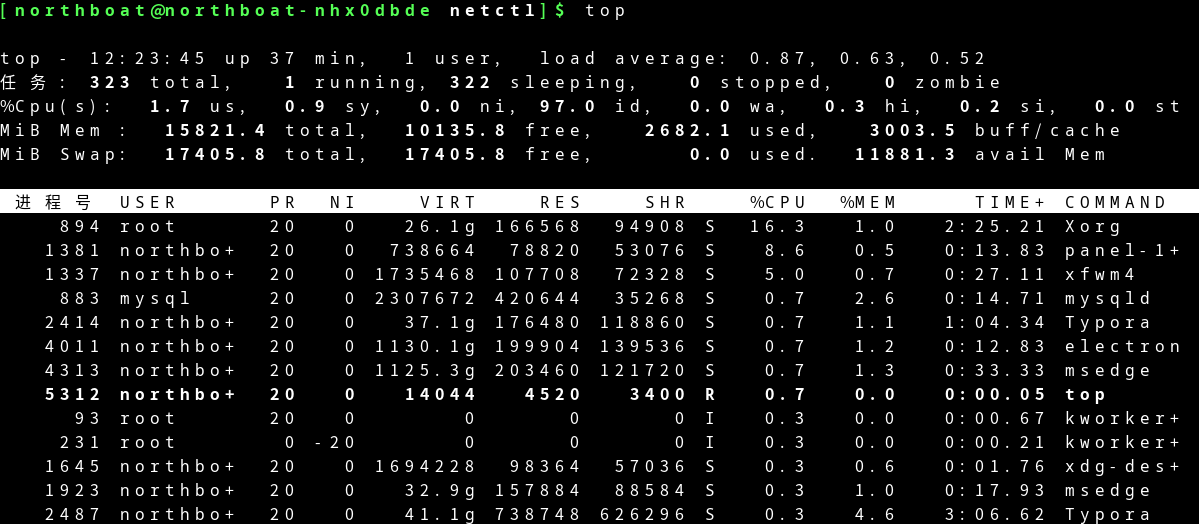
进程管理
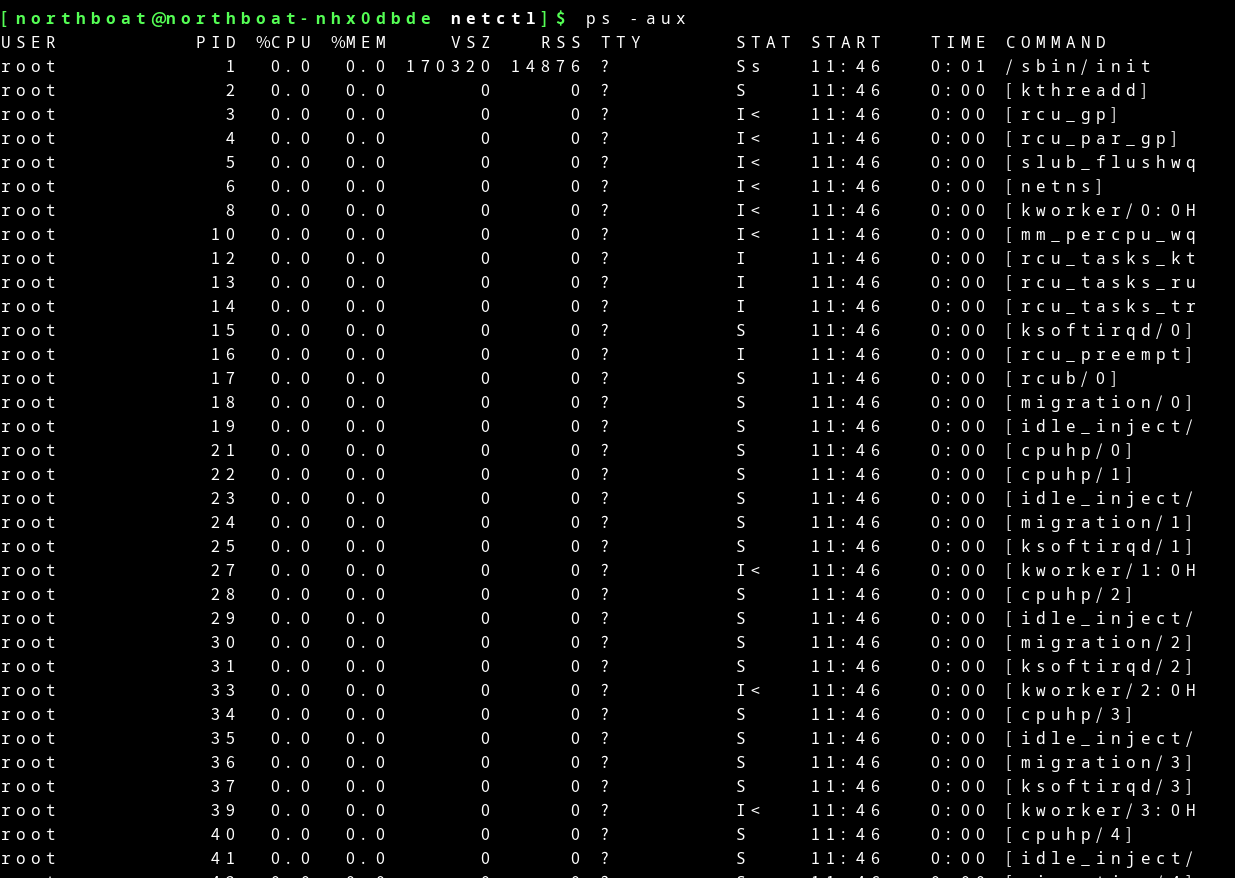
ps命令查看进程

查看所有用户所有进程信息
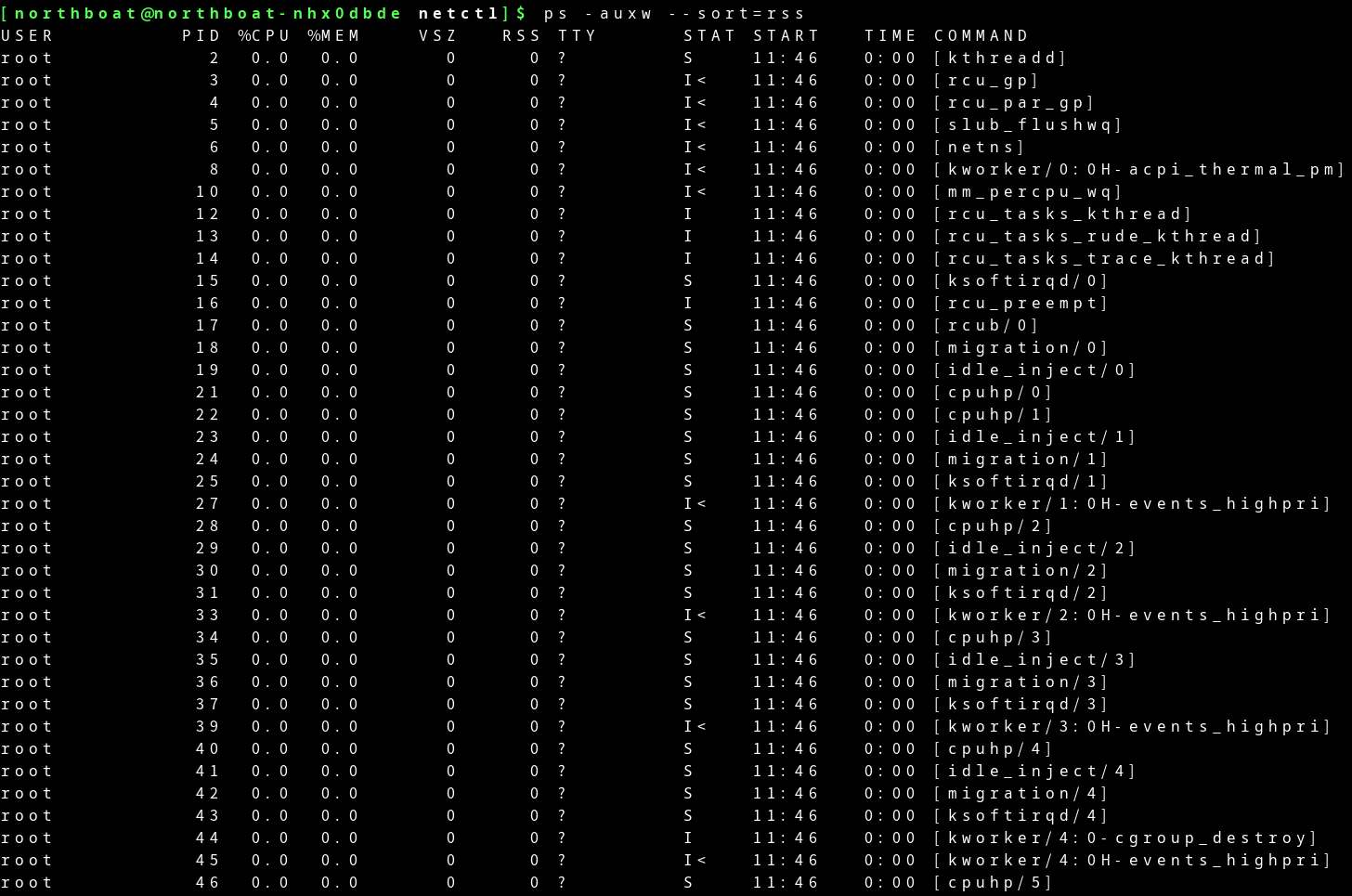
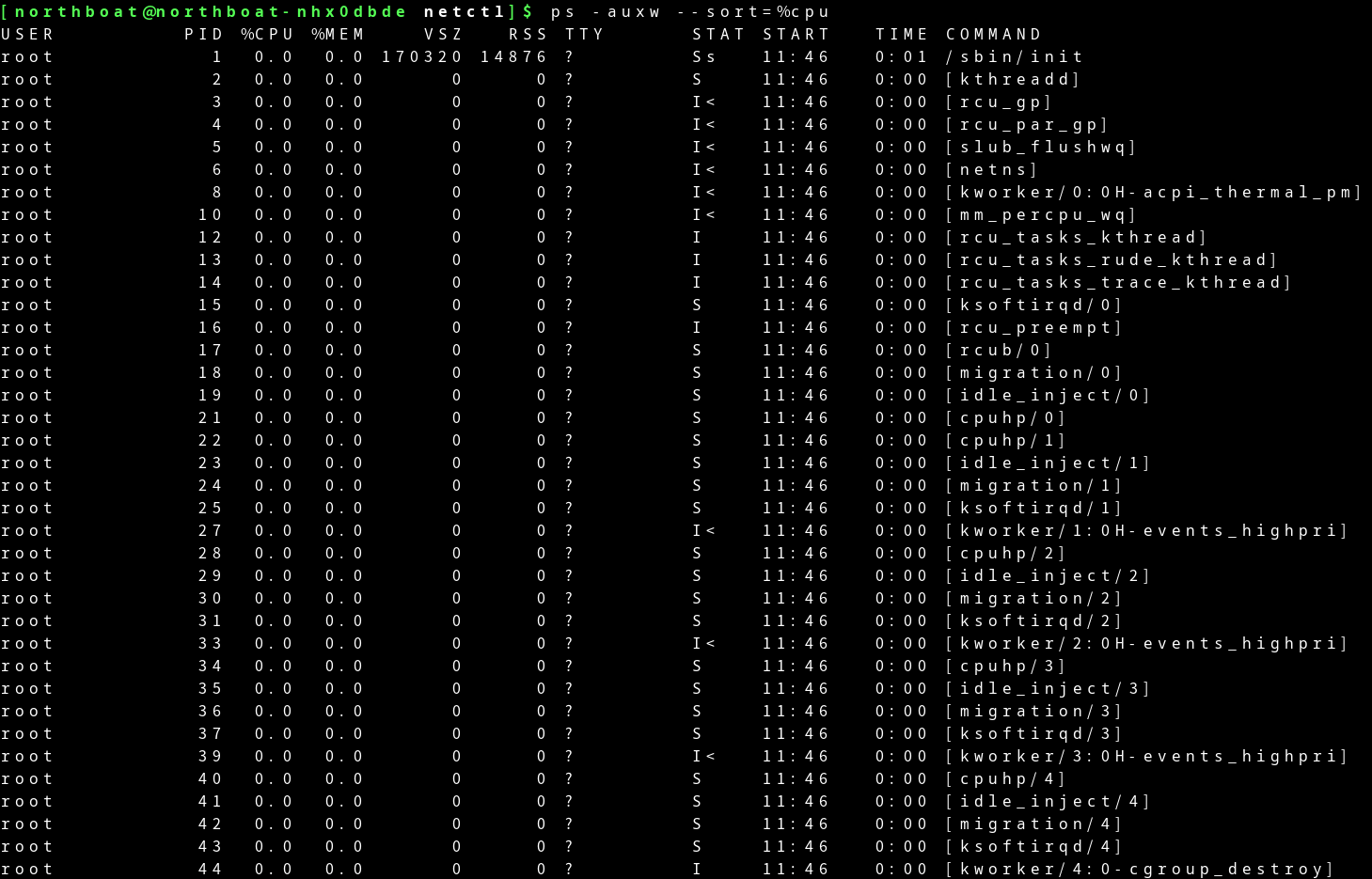
进程信息排序
- 按内存占用
- 按 CPU 占用
动态查看进程信息
终止进程
# 根据 pid 杀死进程
kill -9 pid
# 根据进程名查找 pid
pgrep -f name
# 根据进程名杀死进程
pkill -f name
2
3
4
5
6
7
8
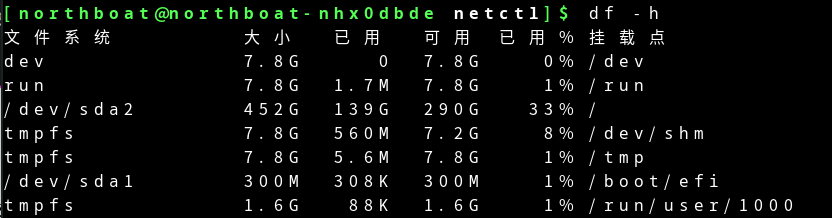
磁盘管理
查看已挂载磁盘总容量、已使用、剩余容量
查看目录或文件所占空间


实验总结
对于个人用户,修改静态 IP 便于在局域网内访问机器,之前使用系统提供的配置文件对静态 IP 进行过修改,但每次重启或重新联网后都会重置该 IP,后采用netctl对静态 IP 进行统一管理,解决问题
Linux 服务器配置
实现环境
centos7
Linux VM-0-17-centos 3.10.0-1160.88.1.el7.x86_64 #1 SMP Tue Mar 7 15:41:52 UTC 2023 x86_64 x86_64 x86_64 GNU/Linux
ssh
实验内容
下载 Nginx 服务器
通过 wget 在 nginx 官网下载
wget http://nginx.org/download/nginx-1.17.6.tar.gz
安装必要依赖
yum -y install gcc pcre pcre-devel zlib zlib-devel openssl openssl-devel
创建目录
mkdir /usr/local/nginx
解压 nginx 压缩包
tar -zxvf nginx-1.17.6.tar.gz -C /usr/local/nginx
编译 nginx
cd /usr/local/nginx/nginx-1.17.6
./configure
make
make install
2
3
4
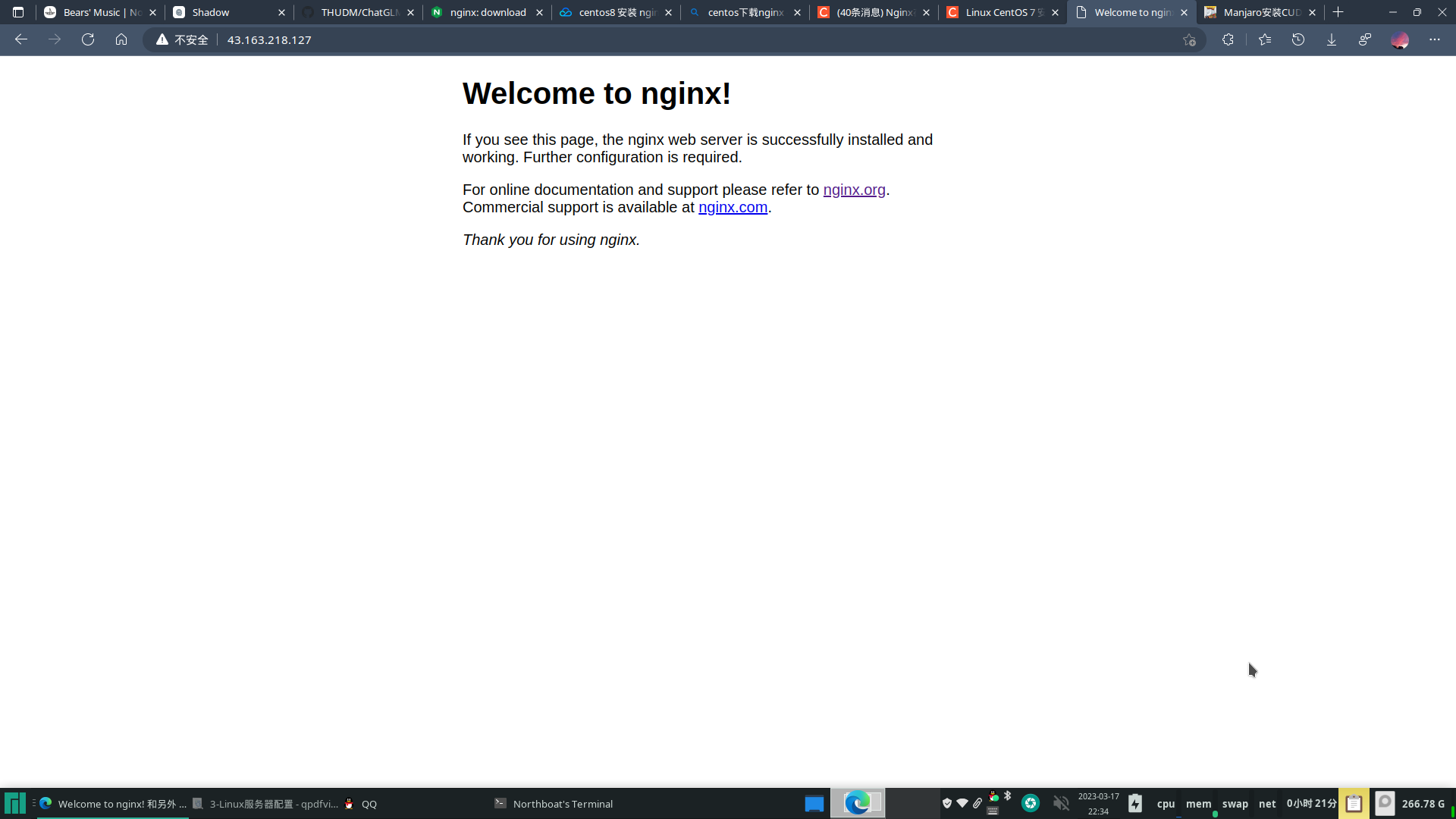
启动 nginx
cd /usr/local/nginx
./nginx
2
查看启动情况,浏览器进入http://43.163.218.127/
下载 MariaDB
通过 yum 安装
yum install mariadb-server
启动 mariadb
systemctl start mariadb # 开启服务
systemctl enable mariadb # 设置为开机自启动服务
2
数据库配置
mysql_secure_installation
Enter current password for root (enter for none): # 输入数据库超级管理员root的密码(注意不是系统root的密码),第一次进入还没有设置密码则直接回车
Set root password? [Y/n] # 设置密码,y
New password: # 新密码
Re-enter new password: # 再次输入密码
Remove anonymous users? [Y/n] # 移除匿名用户, y
Disallow root login remotely? [Y/n] # 拒绝root远程登录,n,不管y/n,都会拒绝root远程登录
Remove test database and access to it? [Y/n] # 删除test数据库,y:删除。n:不删除,数据库中会有一个test数据库,一般不需要
Reload privilege tables now? [Y/n] # 重新加载权限表,y。或者重启服务也许
2
3
4
5
6
7
8
9
10
11
12
13
14
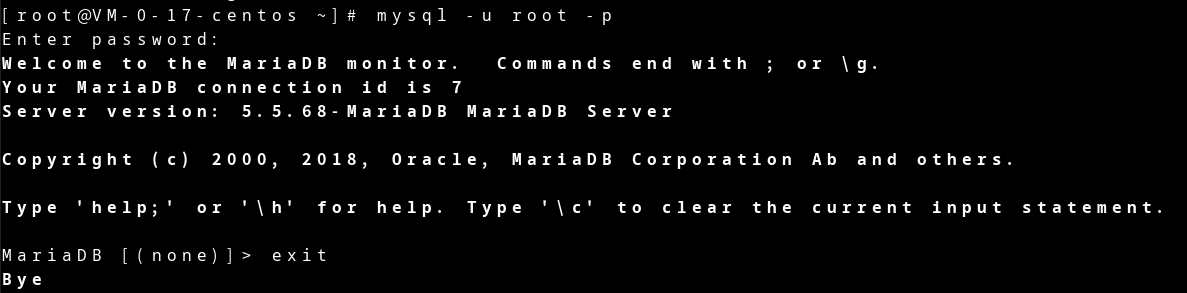
登录
下载 Redis
wget 下载
wget https://github.com/redis/redis/archive/redis-7.0.9.tar.gz
解压
tar -zvxf redis-7.0.9.tar.gz -C /usr/local/redis
编译
cd /usr/local/redis/redis/redis-7.0.9
make
2
安装
make PREFIX=/usr/local/redis install
复制默认配置文件
cp redis.conf ../bin
设置 redis.conf
requirepass 123456 # 设置密码
daemonize yes # 允许后台运行
bind 0.0.0.0 # 允许远程访问
2
3
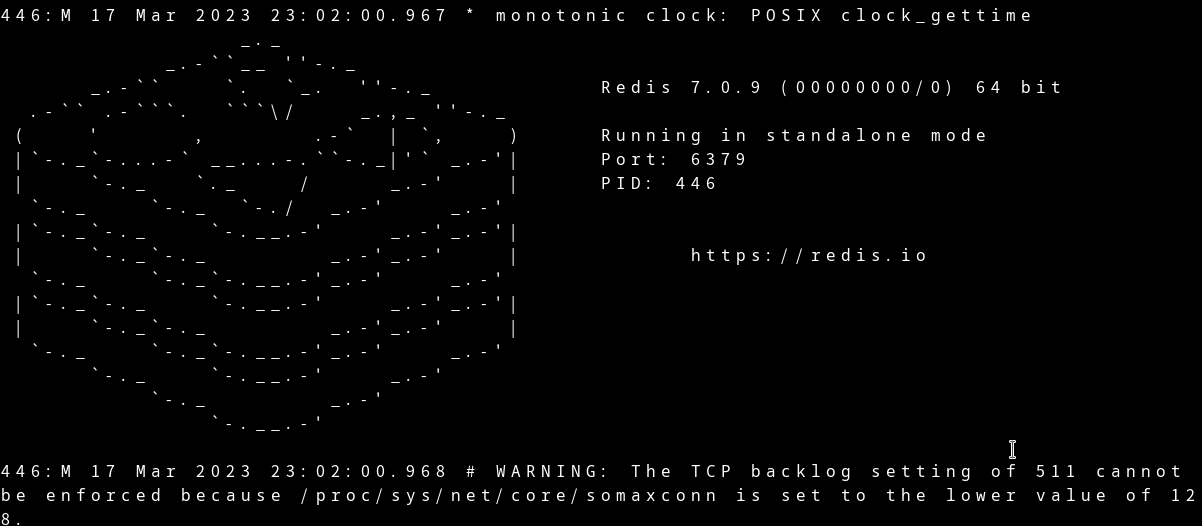
启动
cd /usr/local/redis/bin
./redis-server redis.conf
2
安装 OpenJDK17
wget 下载最新的 jdk17
wget https://download.oracle.com/java/17/latest/jdk-17_linux-x64_bin.tar.gz
解压
tar xf jdk-17_linux-x64_bin.tar.gz
移动位置
mv jdk-17.0.6/ /usr/lib/jvm/jdk-17.0.6
修改环境配置
vim /etc/profile
添加以下内容
export JAVA_HOME=/usr/lib/jvm/jdk-17.0.6
export CLASSPATH=$JAVA_HOME/lib:$JRE_HOME/lib:$CLASSPATH
export PATH=$JAVA_HOME/bin:$JRE_HOME/bin:$PATH
2
3
重新加载配置
source /etc/profile
测试安装
java -version

安装 RabbitMQ
安装 Erlang 环境,yum 下载
安装依赖
curl -s https://packagecloud.io/install/repositories/rabbitmq/erlang/script.rpm.sh | sudo bash
下载 erlang
yum install -y erlang
测试安装
erl -version

安装 RabbitMQ
导入 key
rpm --import https://packagecloud.io/rabbitmq/rabbitmq-server/gpgkey
rpm --import https://packagecloud.io/gpg.key
2
安装依赖
curl -s https://packagecloud.io/install/repositories/rabbitmq/rabbitmq-server/script.rpm.sh | sudo bash
wget 下载 rabbitmq
wget https://github.com/rabbitmq/rabbitmq-server/releases/download/v3.8.5/rabbitmq-server-3.8.5-1.el7.noarch.rpm
直接安装将报错
rpm -ivh rabbitmq-server-3.8.5-1.el7.noarch.rpm
warning: rabbitmq-server-3.8.5-1.el7.noarch.rpm: Header V4 RSA/SHA256 Signature, key ID 6026dfca: NOKEY
error: Failed dependencies:
socat is needed by rabbitmq-server-3.8.5-1.el7.noarch
2
3
4
5
导入 key
rpm --import https://www.rabbitmq.com/rabbitmq-release-signing-key.asc
安装 socat
yum -y install epel-release
yum -y install socat
2
重新安装
rpm -ivh rabbitmq-server-3.8.5-1.el7.noarch.rpm
启用 rabbitmq 插件
rabbitmq-plugins enable rabbitmq_management
启动 rabbitmq
systemctl start rabbitmq-server
创建用户
rabbitmqctl add_user admin 011026
设置超级管理员权限
rabbitmqctl set_user_tags admin administrator
重启 rabbitmq
systemctl restart rabbitmq-server
查看可视化界面:43.163.218.127:15672
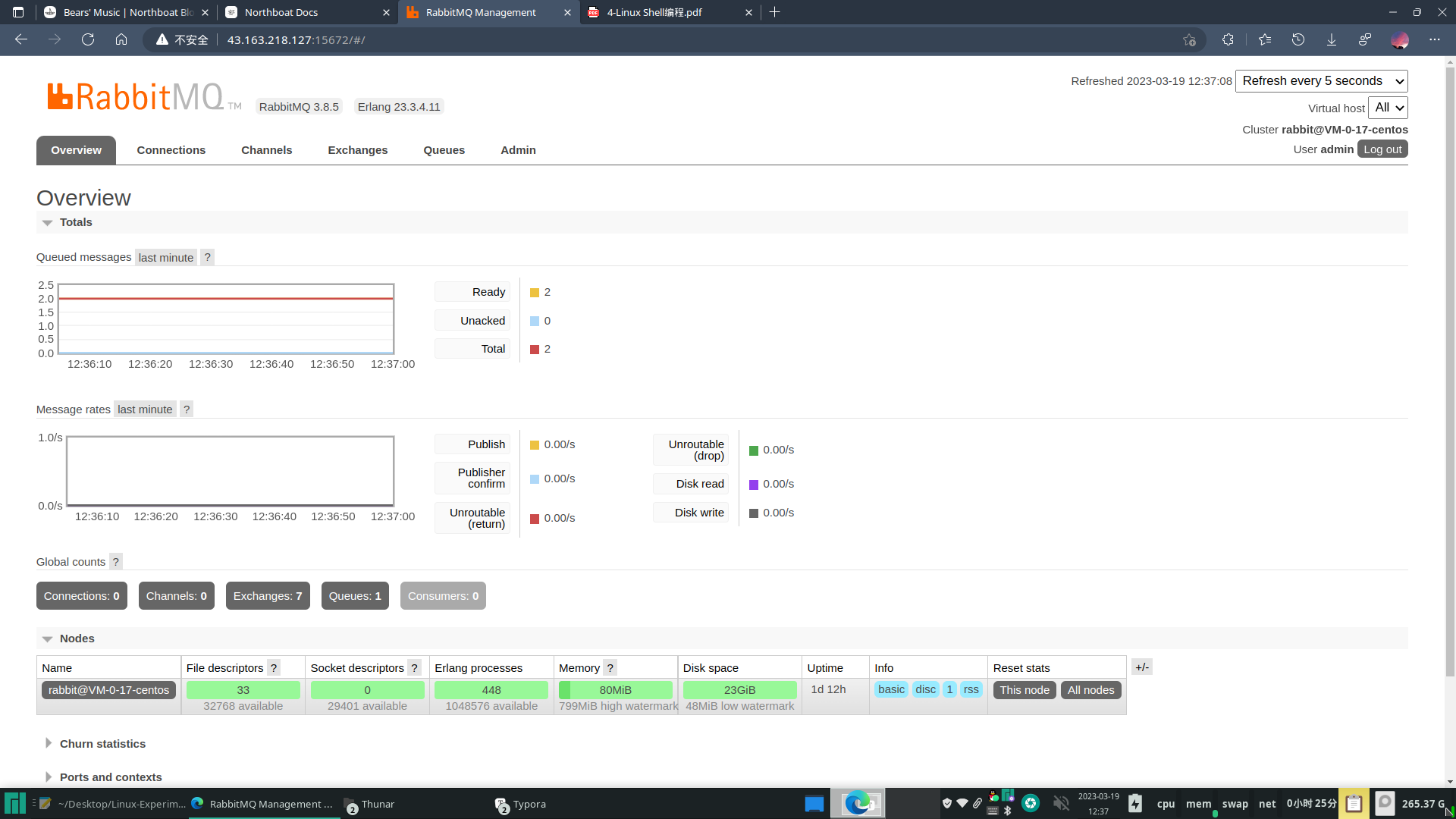
设置virtual host为/,默认为ALL
服务器使用
使用 ftp 工具上传文件
- 一个前端网页
- 一个 jar 包
将 nginx 目录下 html 文件夹内容替换为上传的index.html,并将资源放在相应目录下
配置 nginx.conf 文件,设置端口及负载均衡
启动 jar 包
nohup java -jar Shadow-0.0.1-SNAPSHOT.jar &
访问43.163.218.127:80
实验总结
通过部署安装mysql、redis、rabbitmq、nginx实现服务器环境搭建,成功跑通两个 Java 网页服务,使我对服务器的部署流程更加熟练
Linux Shell 编程
实现环境
manjaro 本地 shell,内核版本
Linux northboat-nhx0dbde 6.1.12-1-MANJARO #1 SMP PREEMPT_DYNAMIC Tue Feb 14 21:59:10 UTC 2023 x86_64 GNU/Linux
实验内容
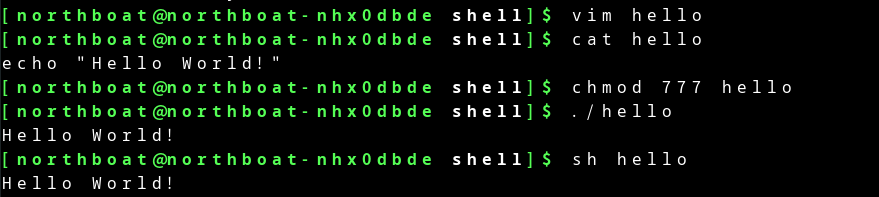
第一个 Shell 脚本
hello.sh
echo "Hello World!"
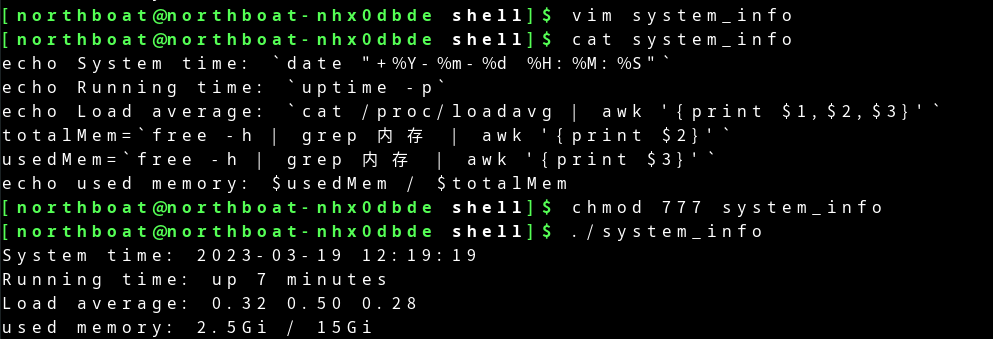
利用脚本获取系统信息
echo System time: `date "+%Y-%m-%d %H:%M:%S"`
echo Running time: `uptime -p`
echo Load average: `cat /proc/loadavg | awk '{print $1,$2,$3}'`
totalMem=`free -h | grep 内存 | awk '{print $2}'`
usedMem=`free -h | grep 内存 | awk '{print $3}'`
echo used memory: $usedMem / $totalMem
2
3
4
5
6
获取网卡信息
network_monitor.sh
echo IP: `ifconfig wlp12s0 | grep -w inet | awk '{print $2}'`
# get receive bytes 10 seconds ago
inputBytes1=`cat /proc/net/dev | grep wlp12s0 | awk -F: '{print $2}' | awk '{print $1}'`
# get transmit bytes 10 seconds ago
outputBytes1=`cat /proc/net/dev | grep wlp12s0 | awk -F: '{print $2}' | awk '{print $9}'`
echo Input bytes1: $inputBytes1 Output bytes1: $outputBytes1
sleep 10
# get receive bytes 10s later
inputBytes2=`cat /proc/net/dev | grep wlp12s0 | awk -F: '{print $2}'|awk '{print $1}'`
# get transmit bytes 10s later
outputBytes2=`cat /proc/net/dev | grep wlp12s0 | awk -F: '{print $2}'|awk '{print $9}'`
echo Input bytes2: $inputBytes2 Output bytes2: $outputBytes2
# evaluate the network
if [ $inputBytes1 -le $inputBytes2 ]
then
echo Network traffic is on the rise.
else
echo Network traffic is on the falling.
fi
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27

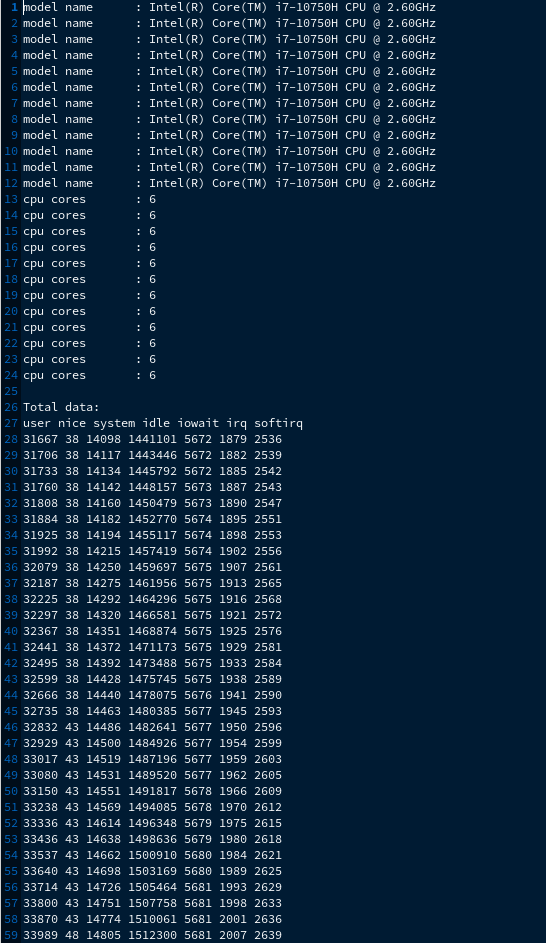
监控 CPU 负载
cpu_monitor.sh
#Function: monitor load average of cpu, and write to file
if [ -f cpu_monitor.txt ]
then
touch cpu_monitor.txt
fi
# modify file permission
if [ -w cpu_monitor.txt ]
then
chmod 755 cpu_monitor.txt
fi
# write cpu infomation
cat /proc/cpuinfo | grep "model name" > cpu_monitor.txt
cat /proc/cpuinfo | grep "cpu cores" >> cpu_monitor.txt
echo " " >> cpu_monitor.txt
echo Total data: >> cpu_monitor.txt
echo user nice system idle iowait irq softirq >> cpu_monitor.txt
#write cpu infomation every 2s
for ((i=0;i<=50;i++))
do
cat /proc/stat | grep 'cpu ' | awk '{print $2" "$3" "$4" "$5" "$6" "$7" "$8}' >> cpu_monitor.txt
sleep 2
done
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26

实验总结
注意添加空格,命令后一定要有,加参数后一定要有,否则报错很难找,通过本次实验,大大加强了我的 Shell 编程能力,对父子进程有一定的了解,并且在排错过程中增强了心态
Linux 内核编译
实验环境
Vmware 虚拟机,Ubuntu16,为排除权限问题,本次实验命令均在root用户下执行
Linux ubuntu 4.15.0-112-generic #113~16.04.1-Ubuntu SMP Fri Jul 10 04:37:08 UTC 2020 x86_64 x86_64 x86_64 GNU/Linux
实验内容
工具及环境准备
手动下载 Busybox,apt安装 QEMU 等工具
环境配置
apt-get install gcc qemu qemu-system-arm gcc-arm-linux-gnueabi libncurses5-dev build-essential flex bison bc
编译最小文件系统
解压 busybox 至根目录,编译配置文件
tar -jxvf busybox-1.28.4.tar.bz2
cd /busybox-1.28.4
export ARCH=arm
export CROSS_COMPILE=arm-linux-gnueabi-
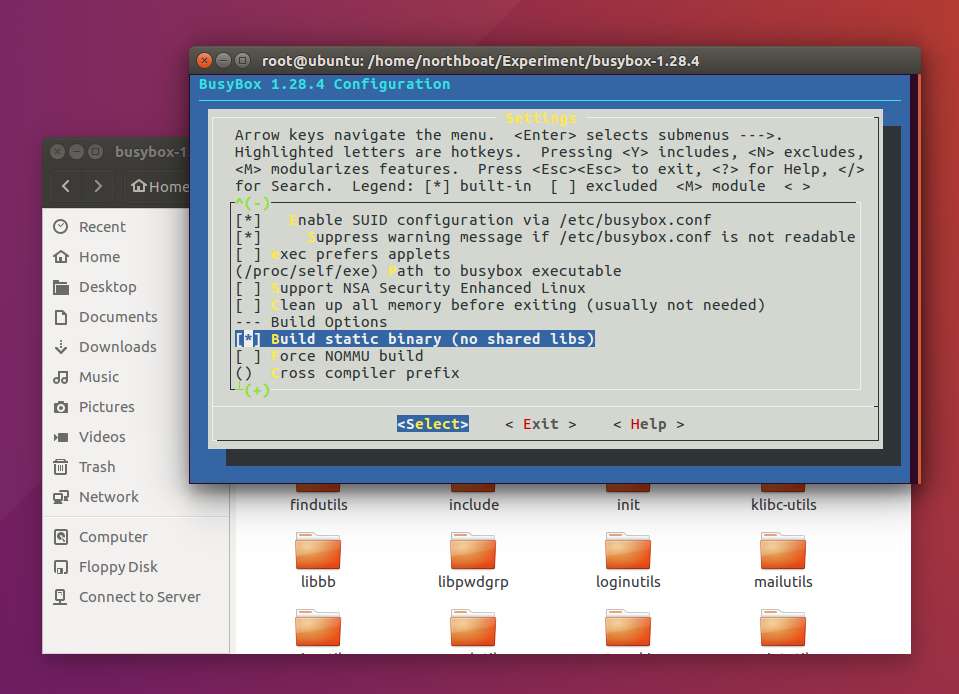
make menuconfig
2
3
4
5
在图形化界面进行内核配置:settings - Build Options - [*]Build static binary(no shared libs)
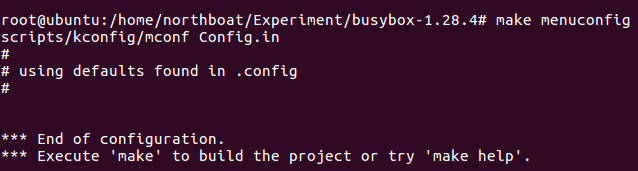
配置完成后,编译文件系统
make install
完成后会在目录下生成_install目录

编译内核
解压Linux5.1内核文件包,将_install拷入内核包的根目录,在_install下创建以下目录
mkdir etc
mkdir dev
mkdir mnt
mkdir –p etc/init.d
2
3
4
在_install/etc/init.d中创建文件rcS
mkdir -p /proc
mkdir -p /tmp
mkdir -p /sys
mkdir -p /mnt
/bin/mount -a
mkdir -p /dev/pts
mount -t devpts devpts /dev/pts
echo /sbin/mdev > /proc/sys/kernel/hotplug
mdev –s
2
3
4
5
6
7
8
9
修改该文件权限
chmod 755 rcS
在_install/etc下创建文件fstab
proc /proc proc defaults 0 0
tmpfs /tmp tmpfs defaults 0 0
sysfs /sys sysfs defaults 0 0
tempfs /dev tmpfs defaults 0 0
debugfs /sys/kernel/debug debugfs defaults 0 0
2
3
4
5
在_install/etc下创建文件inittab
::sysinit:/etc/init.d/rcS
::respawn:-/bin/sh
::askfirst:-/bin/sh
::ctrlaltdel:/bin/umount -a -r
2
3
4
在_install/dev下创建设备节点
mknod console c 5 1
mknod null c 1 3
2
完成设置后,在内核根目录中编译内核配置
export ARCH=arm
export CROSS_COMPILE=arm-linux-gnueabi-
make vexpress_defconfig
make menuconfig
2
3
4
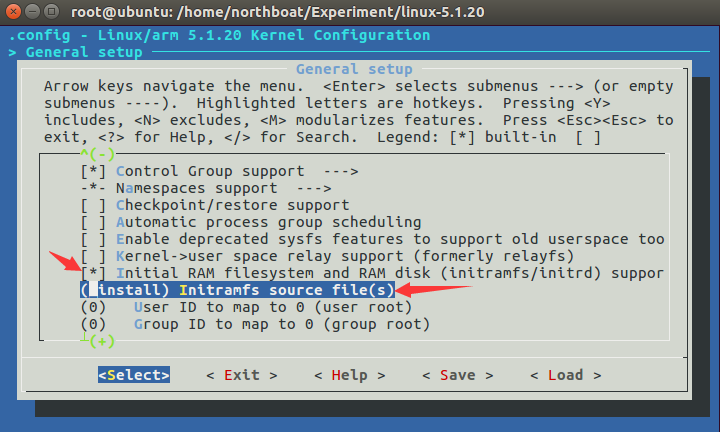
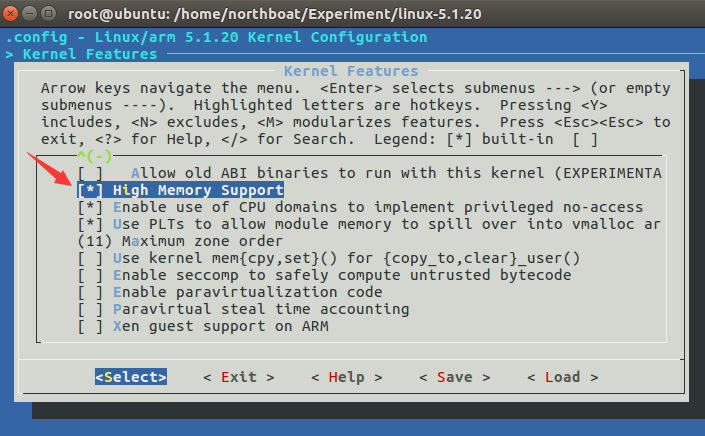
完成以下设置
将_install填入Initramfs source file:位于General setup - [*]Initial RAM filesystem and RAM disk (initramfs/initrd) support - (_install)Initramfs source file(s)
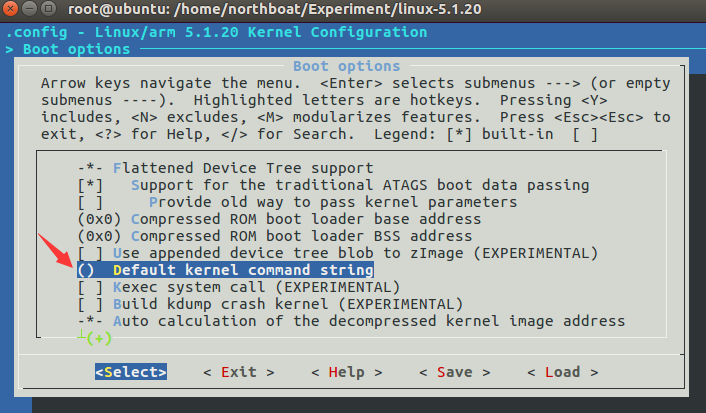
清空Default kernel command string:位于Boot option - Default kernel command string
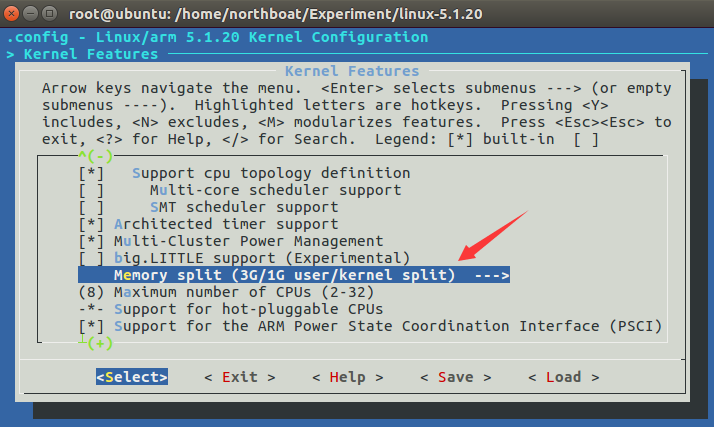
配置memory split并打开高内存支持:Kernel features - Memory split(3G/1G user/kernel) & [*] High Memory Support
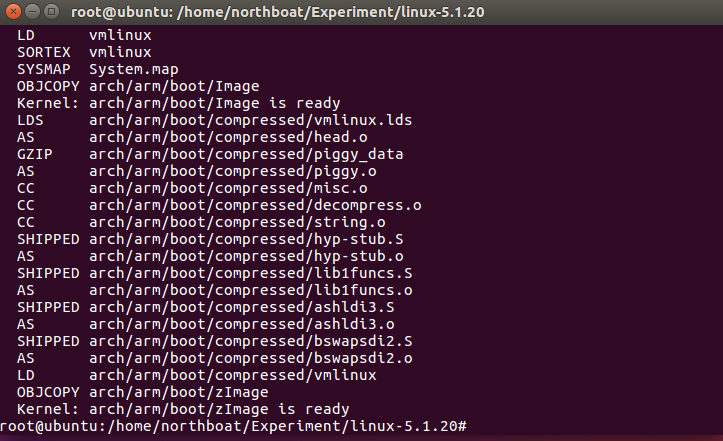
编译内核
make bzImage ARCH=arm CROSS_COMPILE=arm-linux-gnueabi-
编译生成 dtb 文件
make dtbs

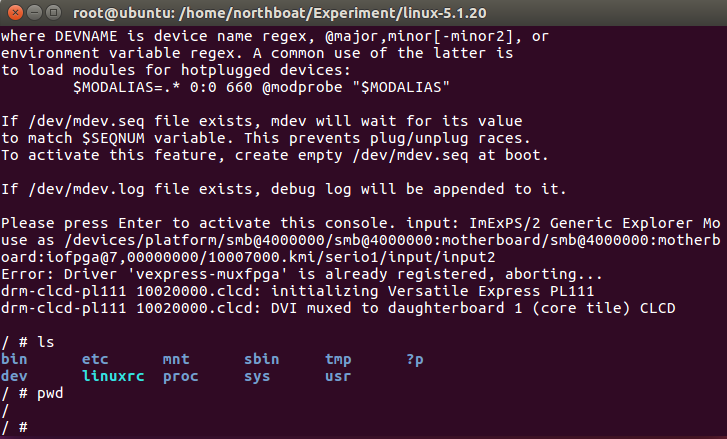
运行 QEMU
在编译好的 linux 内核根目录下执行
qemu-system-arm -M vexpress-a9 -m 256M -kernel arch/arm/boot/zImage -append "rdinit=/linuxrc console=ttyAMA0 loglevel=8" -dtb arch/arm/boot/dts/vexpress-v2p-ca9.dtb -nographic
以上命令中参数含义如下
- -M:指定硬件芯片框架
- -m:指定运行内存大小
- -kernel:指定运行的内核镜像
- -dtb:指定具体芯片的配置信息
- -nographic:指定不使用图形界面
成功进入内核命令行
实验总结
通过手动编译 Linux 内核模块,以及通过 qemu 启动手动编译内核,使我明白了 Linux 的起源,以及对操作系统埋下了浓厚的兴趣,大量的.c及.s代码构成了庞大 Linux 的核心部件
Linux 内核模块
实验环境
Vmware 虚拟机,Ubuntu16
Linux ubuntu 4.15.0-112-generic #113~16.04.1-Ubuntu SMP Fri Jul 10 04:37:08 UTC 2020 x86_64 x86_64 x86_64 GNU/Linux
实验内容
编写一个简单的内核模块
编写模块程序:hello_module.c
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/init.h>
static int __init hello_init(void){
printk("This is hello_module, welcome to Linux kernel \n");
return 0;
}
static void __exit hello_exit(void){
printk("see you next time!\n");
}
module_init(hello_init);
module_exit(hello_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("Mr Yu");
MODULE_DESCRIPTION("hello kernel module");
MODULE_ALIAS("hello");
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
编译内核模块:编写Makefile文件
obj-m := hello_module.o
KERNELBUILD := /lib/modules/$(shell uname -r)/build
CURRENT_PATH := $(shell pwd)
all:
make -C $(KERNELBUILD) M=$(CURRENT_PATH) modules
clean:
make -C $(KERNELBUILD) M=$(CURRENT_PATH) clean
2
3
4
5
6
7
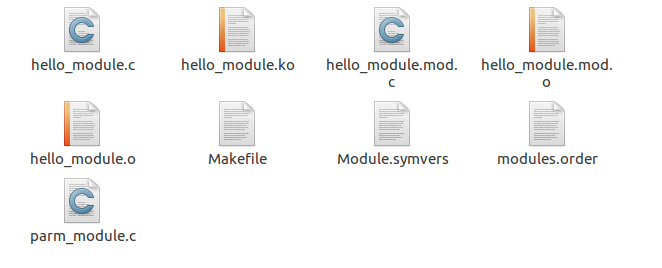
编译:将hello_module.c和Makefile放在同一目录做
make
得到hello_module.ko文件
检查编译模块:通过file命令检查编译模块是否正确
file hello_module.ko

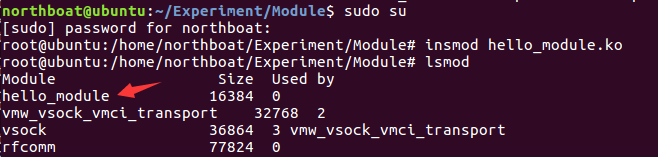
插入模块:通过insmod命令插入模块
insmod hello_module.ko
完成插入后使用lsmod命令查看当前模块是否被加载到系统中
lsmod
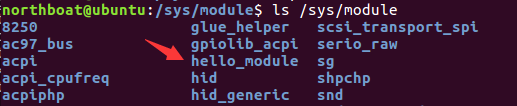
在/sys/modules目录下会有以模块名命名的目录
ls /sys/module
查看输出:通过tail /var/log/messages或dmesg命令查看输出结果
tail /var/log/message
dmesg
2

卸载模块:通过rmmod命令卸载模块
rmmod hello_module
通过dmesg命令查看结果
dmesg

编写带参模块
Linux 内核提供一个宏来实现模块的参数传递
编写模块代码:parm_module.c
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/init.h>
static int debug = 1;
module_param(debug, int, 0644);
MODULE_PARM_DESC(debug, "debugging information");
#define dprintk(args...) if(debug){printk(KERN_DEBUG args);}
static int myparm = 10;
module_param(myparm, int, 0644);
MODULE_PARM_DESC(myparm, "kernel module parameter experiment.");
static int __init parm_init(void){
dprintk("my linux kernel module init.\n");
dprintk("module parameter = %d\n", myparm);
return 0;
}
static void __exit parm_exit(void){
printk("see you next time!\n");
}
module_init(parm_init);
module_exit(parm_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("Mr Yu");
MODULE_DESCRIPTION("kernel module paramter experiment");
MODULE_ALIAS("myparm");
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
修改Makefile文件,编译并插入模块
Makefile
obj-m := parm_module.o
KERNELBUILD := /lib/modules/$(shell uname -r)/build
CURRENT_PATH := $(shell pwd)
all:
make -C $(KERNELBUILD) M=$(CURRENT_PATH) modules
clean:
make -C $(KERNELBUILD) M=$(CURRENT_PATH) clean
2
3
4
5
6
7
make
插入
insmod parm_module.ko
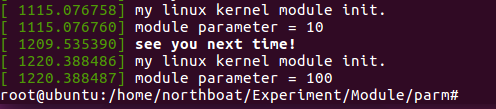
通过 dmesg 查看日志信息,可发现输出以上程序中 myparm 的默认值

卸载模块
rmmod parm_module
赋值重新加载模块,修改参数myparm值为 100
insmod parm_module.ko myparm=100
通过 dmesg 查看日志信息,可发现 myparm 值已经改变
实验总结
通过内核模块的编写以及插入使用,使我对 Linux 的 Freedom 理念理解得更加深刻,同时对 linux c 编程有了更深入的理解
Linux 内存管理
实验环境
Vmware 虚拟机,Ubuntu16,
Linux ubuntu 4.15.0-112-generic #113~16.04.1-Ubuntu SMP Fri Jul 10 04:37:08 UTC 2020 x86_64 x86_64 x86_64 GNU/Linux
实验内容
virtual memory areas,VMA
本实验内容编写一个内核模块,遍历一个用户进程中所有的 VMA,并且打印 这些 VMA 的属性信息,如 VMA 的大小、起始地址等,并通过与/proc/pid/maps中显示的信息进行对比验证 VMA 信息是否正确
编写并编译模块程序
vma_test.c
#include <linux/module.h>
#include <linux/init.h>
#include <linux/mm.h>
#include <linux/sched.h>
static int pid;
module_param(pid, int, 0644);
static void printit(struct task_struct *tsk) {
struct mm_struct *mm;
struct vm_area_struct *vma;
int j = 0;
unsigned long start, end, length;
mm = tsk->mm;
pr_info("mm_struct addr = 0x%p\n", mm);
vma = mm->mmap;
/* 使用 mmap_sem 读写信号量进行保护 */
down_read(&mm->mmap_sem);
pr_info("vmas: vma start end length\n");
while (vma) {
j++;
start = vma->vm_start;
end = vma->vm_end;
length = end - start;
pr_info("%6d: %16p %12lx %12lx %8ld\n",
j, vma, start, end, length);
vma = vma->vm_next;
}
up_read(&mm->mmap_sem);
}
static int __init vma_init(void) {
struct task_struct *tsk;
/* 如果插入模块时未定义 pid 号,则使用当前 pid */
if (pid == 0) {
tsk = current;
pid = current->pid;
pr_info("using current process\n");
} else {
tsk = pid_task(find_vpid(pid), PIDTYPE_PID);
}
if (!tsk)
return -1;
pr_info(" Examining vma's for pid=%d, command=%s\n", pid, tsk->comm);
printit(tsk);
return 0;
}
static void __exit vma_exit(void) {
pr_info("Module exit\n");
}
module_init(vma_init);
module_exit(vma_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("Mr Yu");
MODULE_DESCRIPTION("vma test");
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
编译内核模块
编写 Makefile
obj-m := vma_test.o
KERNELBUILD := /lib/modules/$(shell uname -r)/build
CURRENT_PATH := $(shell pwd)
all:
make -C $(KERNELBUILD) M=$(CURRENT_PATH) modules
clean:
make -C $(KERNELBUILD) M=$(CURRENT_PATH) clean
2
3
4
5
6
7
8
9
使用 make 命令编译,得到vma_test.ko文件
插入模块
通过 top 命令随便获取一个进程号
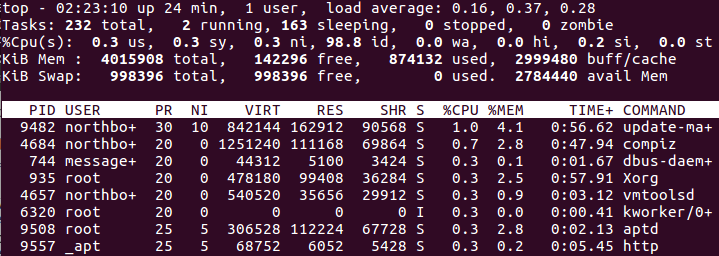
这里选择Xorg的进程号935,使用 insmod 命令插入模块并传参
insmod vma_test.ko 935
查看程序打印信息
使用 dmesg 查看信息
dmesg
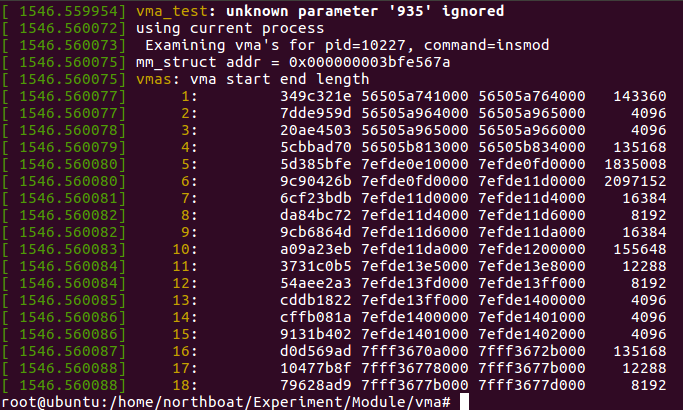
从 proc 虚拟文件系统中查看进程第一个 VMA 的信息
cat /proc/935/smaps

通过对比发现第一块内存区域地址起始位置一致,说明程序输出信息正确
实验总结
通过内核模块程序查看 VMA,使我对 linux 内核模块编写能力提升,并且对 linux 的内存管理理解更加深刻
Linux 设备驱动
实验环境
Vmware 虚拟机,Ubuntu16,
Linux ubuntu 4.15.0-112-generic #113~16.04.1-Ubuntu SMP Fri Jul 10 04:37:08 UTC 2020 x86_64 x86_64 x86_64 GNU/Linux
实验内容
编写驱动程序
mycdev_driver.c
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/init.h>
#include <linux/types.h>
#include <linux/fs.h>
#include <linux/mm.h>
#include <linux/sched.h>
#include <linux/cdev.h>
#include <asm/io.h>
#include <asm/switch_to.h>
#include <asm/uaccess.h>
#include <linux/errno.h>
#include <linux/uaccess.h>
#define MYCDEV_MAJOR 300 /*主设备号,通过cat /proc/devices 查询,选择未使用的设备号*/
#define MYCDEV_SIZE 1024
static int mycdev_open(struct inode *inode, struct file *fp){
return 0;
}
static int mycdev_release(struct inode *inode, struct file *fp){
return 0;
}
/*实现read程序*/
static ssize_t mycdev_read(struct file *fp, char __user *buf, size_t size, loff_t *pos){
unsigned long p = *pos;
unsigned int count = size;
char kernel_buf[MYCDEV_SIZE] = "This is mycdev driver!";
int i;
if(p >= MYCDEV_SIZE)
return -1;
if(count > MYCDEV_SIZE)
count = MYCDEV_SIZE - p;
if(copy_to_user(buf, kernel_buf, count) != 0){
printk("read error!\n");
return -1;
}
printk("reader: %d bytes was read.\n", count);
return size;
}
/*实现write程序*/
static ssize_t mycdev_write(struct file *fp, const char __user *buf, size_t size, loff_t *pos){
return size;
}
/*填充file operations结构*/
static const struct file_operations mycdev_fops = {
.owner = THIS_MODULE,
.open = mycdev_open,
.release = mycdev_release,
.read = mycdev_read,
.write = mycdev_write,
};
/*模块初始化函数*/
static int __init mycdev_init(void){
printk("mycdev driver is now starting!\n");
/*注册驱动程序*/
int ret = register_chrdev(MYCDEV_MAJOR, "my_cdev_driver", &mycdev_fops);
if(ret < 0){
printk("register failed!\n");
return 0;
}else{
printk("register successfully!\n");
}
return 0;
}
/*卸载模块函数*/
static void __exit mycdev_exit(void){
printk("mycdev driver is now leaving!\n");
unregister_chrdev(MYCDEV_MAJOR, " ");
}
module_init(mycdev_init);
module_exit(mycdev_exit);
MODULE_LICENSE("GPL");
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
编译并插入模块
Makefile
obj-m := mycdev_driver.o
KERNELBUILD := /lib/modules/$(shell uname -r)/build
CURRENT_PATH := $(shell pwd)
all:
make -C $(KERNELBUILD) M=$(CURRENT_PATH) modules
clean:
make -C $(KERNELBUILD) M=$(CURRENT_PATH) clean
2
3
4
5
6
7
编译并插入模块
sudo make
insmod mycdev_driver.ko
2


创建文件设备节点
创建文件节点并修改文件权限
sudo mknod /dev/mycdev c 300 0
sudo chmod 777 /dev/mycdev
2

编写测试程序并执行
test.c
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdlib.h>
int main() {
int testdev;
char buf[10];
testdev = open("/dev/mycdev", O_RDWR);
if(testdev == -1){
printf("open file failed!\n");
exit(1);
}
//将 testdev 所指的文件读 10 个字节到 buf 中
if(read(testdev, buf, 10) < 10){
printf("Read error!\n");
exit(1);
}
for(int i = 0; i < 10; i++)
printf("%d\n", buf[i]);
close(testdev);
return 0;
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
编译并执行
sudo gcc test.c -o test
./test
2
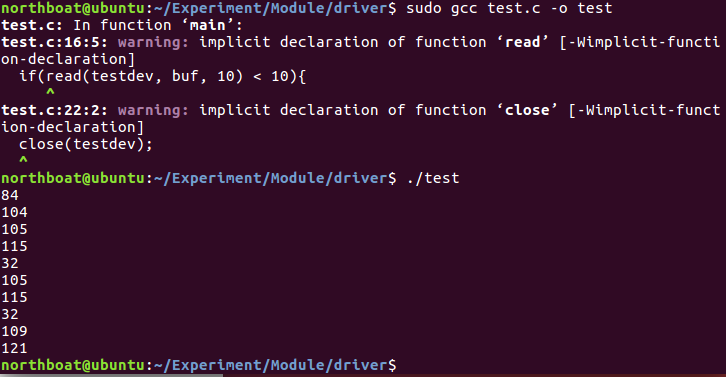
查看日志信息
通过 dmesg 命令查看

实验总结
Linux 内核根据各类设备抽象出一套完整的驱动框架和 API 接口,以便驱动开发者在编写驱动程序时可重复使用,通过调用 Linux 驱动 API,使我对 Linux 的驱动开发有了基础的理解,对 Linux 操作系统也有了更细致的了解