图
图的基本概念
图、子图、简单图、完全图、生成子图
- 无向图:连通性,连通图,连通分量(极大连通子图)
- 有向图:强连通性,强连通图,强连通分量
生成树:极小连通子图
带权图、稀疏图和稠密图
边
- 路径,简单路径(无重复),路径长度,距离
- 回路,简单回路
- 度:出度和入度,数值上等于
2 x 边数,有向图的总出度等于总入度
注意完全图和连通图的区别,还是很大滴
连通子图
- 生成树 <=> 极小连通子图
- 连通分量 <=> 极大连通子图
图的存储结构
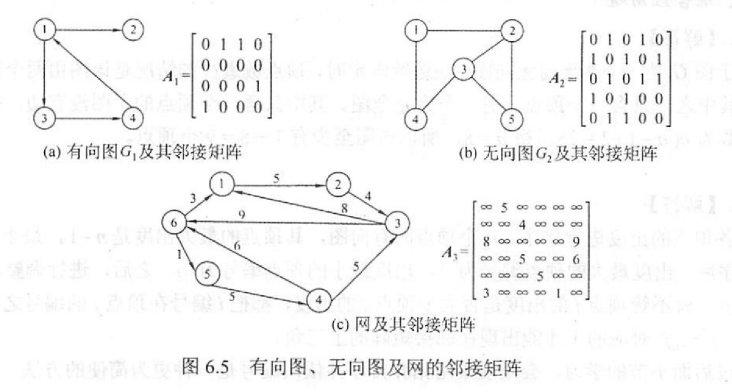
邻接矩阵
用一个二维数组表示图的存储,有向图和无向图都可以存,如
其数据结构定义为
typedef struct{
chat vex[n]; // 顶点表
int edge[n][n]; // 邻接矩阵,边表
int vexnum, arcnum; // 顶点数和弧数
}MGraph;
2
3
4
5
DFS / BFS 遍历的时间复杂度:O(n^2)(n为结点数)
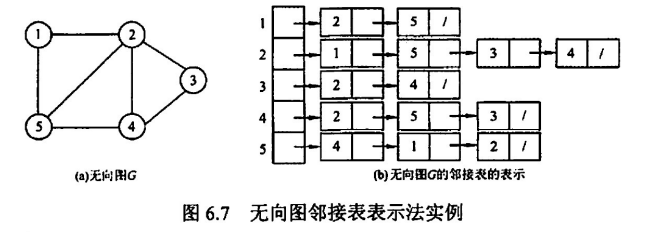
邻接表
类似树的孩子表示法:既可以存无向图,又可以存有向图
- 森林转换:树的孩子兄弟表示法
- 并查集:树的双亲表示法
- 邻接表:树的孩子表示法
无向图的邻接表表示
有向图的邻接表表示
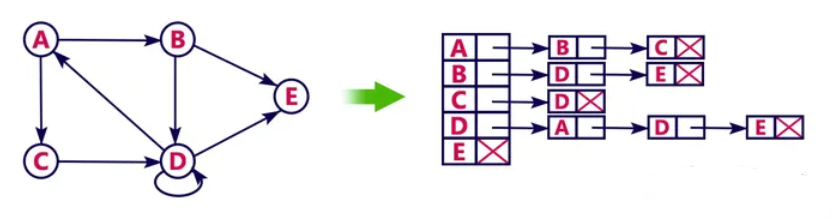
DFS / BFS 遍历的时间复杂度:O(n+e)(其中n为结点数,e为边数)
十字链表与邻接多重表
二者的设计思路相似,都是对一个弧结点设置两个结点表示,两个出入度,这样弧可以同时存在于多个头节点的链表中,有效减少弧的表示,重复利用
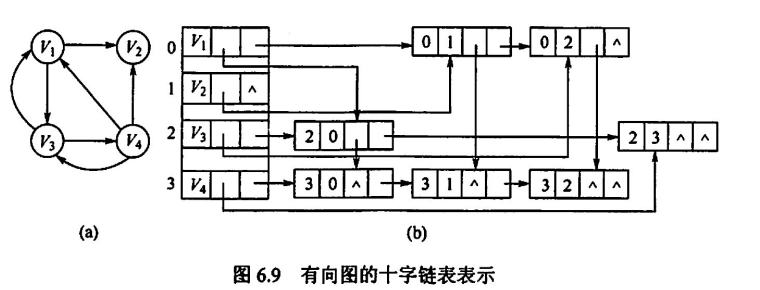
- 十字链表:用于存储有向图
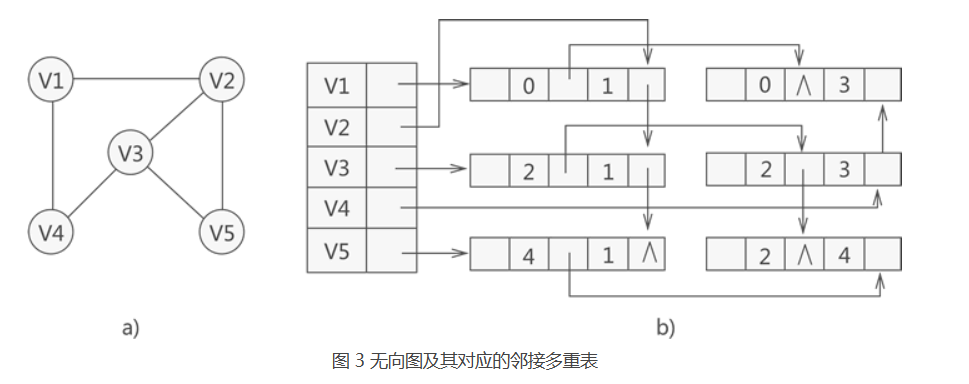
- 邻接多重表:用于存储无向图
十字链表:每个头结点对应两个链表,一个表示入度,一个表示出度,边表中,每个结点同样有两条链,一条表示从 head 到 tail,一条表示从 tail 到 head
邻接多重表:思路和十字链表类似,只是不区分出度和入度,弧的表示是双向的,同时头节点自然只用维护一个链表(因为弧是双向的)
图的遍历
BFS
和树的 BFS 基本相同(树是图的子集,极小连通子图嘛),这里为了避免重复访问结点,需要维护一个 visited 数组标识结点是否被访问
单源最短路径问题,贪心算法
广度优先的生成树,选定结点为根,距离结点距离相同位于树的同一层,依次向下扩展
DFS
深度优先的生成树和生成森林
连通性
一次 BFS/DFS 将 visited 数组塞满,即可证明图是连通的
图的应用
最小生成树
找到权值最小的生成树
普利姆算法:从结点考虑,每次选择和树连接的边权值最小的一个结点扩展,直到结点被遍历
库鲁斯卡尔算法:从边考虑,每次连接边权值最小的两个结点,直到连通
最短路径
迪杰斯特拉算法:求解单源最短路径(当然可以用 BFS 求解),每次选择和树连接的边权值最小的一个结点扩展(这句话和普利姆算法一模一样),然后更新距离所有结点的路径(在普利姆中只考虑距离树的路径,这里要考虑的是距离出发结点的路径)
弗罗伊德算法:求解每对结点的最短路径,维护一个邻接矩阵,每次加入一个结点,并且更新这个矩阵,更新的算法如下,假设加入结点 k,那么对于所有结点的路径长度更新为
有向无环图描述表达式
DAG 图
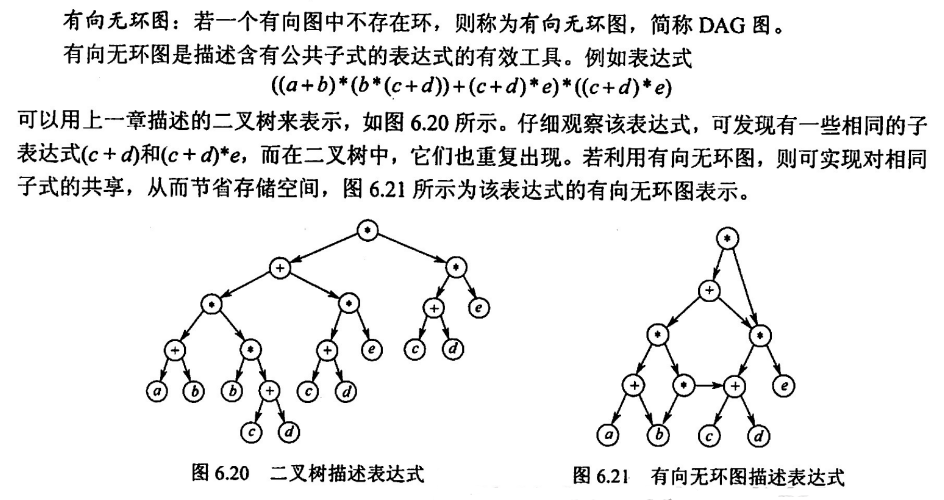

选 A
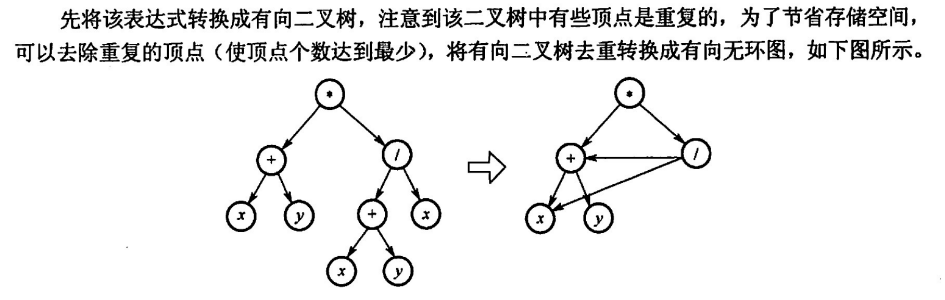
他甚至省去了重复的一个 + 号,太变态了
拓扑排序
AOV 网中,每个结点表示一个活动,AOV 网的拓扑排序,即对各节点进行一维的排序,要求:后面的结点必须在前面的结点活动完成后,才可以进行
给定一个非常朴素的算法用以求解拓扑排序:
- 找到图中入度为 0 的结点,把他从图中删去,包括所有相关联的边
- 重复 1,直到所有结点被删除
注意很有可能同时出现多个入度为 0 的结点,此时随便选一个都是可以的,所有拓扑排序并不是唯一的,并且,对于每一个图的 DFS 序列,其实就是一个拓扑排序
当将删去的结点存在栈中,最后统一出栈访问,这样得到的序列便是逆拓扑序列,对应到 DFS,把访问语句写在递归语句之后,也可以实现逆拓扑排序
关键路径
AOE 网中,每个边表示一个活动,只有当边的头结点活动开始后,这条边的活动才能开始
求解关键路径
- 首先根据边的权值,写出每个结点的最早开始时间,初始结点最早开始时间 0
- 从最后一个结点开始,令其最晚开始时间等于其最早开始时间,向前一步步减去边的权值,得到前一个结点的最晚开始时间
- 当相邻结点,后继的最早开始时间减去前驱的最晚开始时间,等于连接二者边的权值,那么,这条边就在关键路径之上
需要注意的是,单独的减少关键活动的时间,不一定会减少时间的总耗时,因为可能有多条关键路径限制,在他减少之后,就不在关键路径上了
但增加关键活动的时间,一定会增长时间的总耗时