神经网络与深度学习
概述
机器学习
机器学习步骤:数据预处理,特征提取,特征转换,预测
其中中间两步又可被视作特征工程
机器学习的三个基本要素
- 模型:具有内部参数权重 w 和偏置 b
- 学习准则:损失函数和风险最小化准则
- 优化算法:最小二乘法,梯度下降法
损失函数:在确定模型参数 w 和 b 时,力求使损失函数最小化
0/1 损失函数(预测和 y 不同即为 0,否则为 1)
平方损失函数
交叉熵损失函数
期望风险、经验风险和结构风险:又叫期望错误,就是应用在机器学习上模型上的某种损失函数,在学习过程要求通过找到合适的参数将这种风险(错误)实现最小化,也就是所谓的风险最小化准则
梯度下降法:其中 α 为学习率
提前停止:为了防止过拟合,提前停止梯度下降,当然,也可以加入正则项使其转化为结构风险最小化问题防止过拟合
机器学习算法的类型
- 监督学习(输入有标签):算法如线性模型,神经网络
- 无监督学习(输入无标签):算法如主成分分析,自编码器
- 强化学习(通过交互学习)
介于监督学习和无监督学习之间,还有半监督学习,或弱监督学习,其采用一部分有标签的训练集训练出一个基础的模型,再通过这个基础的模型预测无标签数据得到有标签的训练集,选取可靠的部分再作为训练集训练自身(这种方式也叫自训练)
理论和定理
- PAC 学习理论:可能近似正确,在误差足够小时认为正确
- 没有免费午餐定理:没有一种模型能高效解决所有问题
- 奥卡姆剃刀原理:追求简单的模型
- 丑小鸭定理:模型的差异不可简单量化
参数和超参数:模型的参数指其内部参数,如权重 w 和偏置 b,影响模型效率的参数;模型的超参数指描述模型结构的参数,如神经网络的层数,不可通过优化算法优化,需要强经验调整
表示学习
表示学习用以特征提取,将输入变为更有效的特征,主要需要解决语义鸿沟问题
一个好的表示
- 强的表达能力
- 简化后续任务
- 独立性和迁移性
表示学习可以分为
- 局部表示(one-hot 表示):离散的表示
- 分布式表示(如 RGB 颜色,即为三位稠密分布式表示):多维低维稠密向量
表示学习的目的:构建多层次的特征表示(高维到低维的映射)
深度学习
从数据中自动学习到有效的特征表示,主要需要解决各层之间贡献度分配问题,多采用多层神经网络的反向传播算法
从表示学习中,我们可以构建一个多层次的特征表示,深度学习通过多个特征表示,自动学习到有效的特征表示,即为能解决实际问题的模型(预测函数)
端到端学习:和模块化对立,只关注最开始的输入和最后的输出,中间的过程不加以区分
线性模型
线性回归
属于二分类问题,分为简单回归(输出为 0/1)和多元回归(分为多类)
参数学习:学习合适的权重 w 和偏移 b
- 经验风险最小化:最小二乘法,梯度下降法
- 结构风险最小化:正则化,梯度下降法
- 最大似然估计
- 最大后验估计:贝叶斯估计
感知器
是一种线性分类器,只有一个神经元,输出是与不是(1/0),感知器学习算法其实是一个经典的线性参数学习算法(使用梯度下降法求解)
参数学习的梯度下降递归公式
感知器的收敛性,求得最大的特征向量的模 R 和最小的函数值
参数平均的感知器:用以解决参数学习中,输入样例顺序造成的强干扰,简单来说,就是令后学习的样例的学习率降低,能够有效提高感知器的泛化能力
改进的平均感知器参数学习算法
支持向量机
解决二分类问题(线性模型)的经典算法,就是寻找一个使输入 x 间隔最大的超平面(间隔越大,二分划分就越稳定,这很显然)
需要注意的是,这个间隔最大的超平面具有唯一性,间隔公式为
支持向量机的优化(参数学习)是一个凸优化问题
- 参数学习:对模型做出强烈假设,固定参数个数
- 非参数学习:没有固定参数,在学习过程中动态加入参数
支持向量机的决策函数只取决于支持向量的数量,也就是说支持向量机的收敛效率只取决于支持向量
神经网络
非线性的模型,凹优化问题,没有足够的数学理论支撑
前馈神经网络
前馈神经网络分为:全连接神经网络;卷积神经网络
就是一个多层感知器(感知器:线性分类器,只有一个神经元)
- 净输入
- 活性值
- 激活函数
为什么是前馈,上一层感知器的活性值为下一层感知器的输入,经过当前层的加权变换后为净活性值,再经过当前层的激活函数作为新的活性值输入至下一层感知器
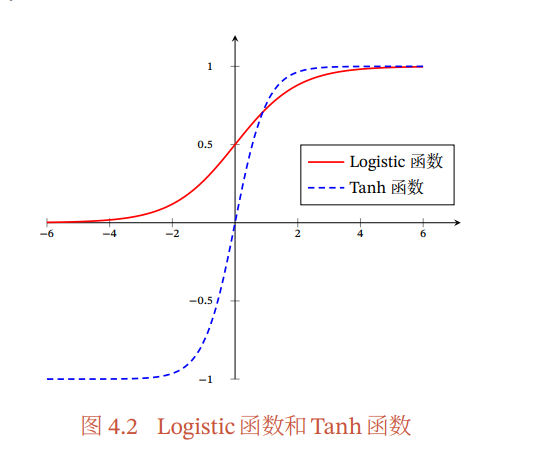
激活函数
Sigmoid 函数:分为 Logistic 和 Tanh 函数,前者非零中心化,后者为零中心化
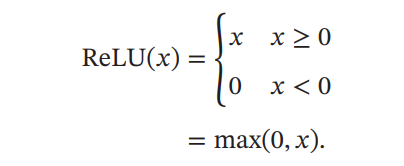
ReLU 函数:一个分段函数,会发生 ReLU 死亡现象(就是在迭代过程中 x 一直小于 0,ReLU 始终为 0,不被触发,就像不存在一样),和梯度消失有点像
反向传播算法:通过激活函数的偏导数,将当前层的活性值反向输入给上一层,这自然有可能造成梯度消失问题
所谓梯度消失,就是当输出乘以导数(很小的值),导致结果越来越小,直到梯度近似为 0,就像消失了一样,这将对神经网络造成严重的计算负担
如何解决梯度消失问题:采用导数较大的激活函数,如 ReLU
自动梯度计算
- 数值微分:根据导函数定义,手动设置 ▲x 为一个很小的值,直接求▲y
- 符号微分:保留符号(未知数)进行微分,微分对象为含未知数的多项式
- 自动微分:处理一个函数或一段程序
卷积
前馈神经网络的一种,全连接神经网络中,每一层感知器都有其权重和偏移,当层数增加时这样的系数将呈指数增加,大大降低了计算效率
于是就有了卷积神经网络,其特征为权值共享、局部连接、汇聚,其结构由卷积层、汇聚层、全连接层构成
信号序列 x 和滤波器 w 的乘积之和即为卷积
卷积良好的数学性质:交换性和导数
循环神经网络
不同于前馈神经网络的单向传播(从上一层传向下一层直到全连接层),循环神经网络通过随时间反向传播算法可以将错误反向传播给前驱,使神经网络具有短期记忆能力
网络优化和正则化
常见的优化方向
- 梯度下降批量选择:常采用小批量梯度下降法
- 学习率调整:学习率衰减,学习率预热,学习率周期调整(加大)
- 梯度估计修正
RMSprop 算法
用于学习率调整
先计算参数梯度的累计值,其中 gt 为本次迭代的梯度,β 为衰减率(常为 0.9)
AdaGrad 算法:和 RMSprop 的区别就是 Gt 的求法不一样,其 Gt 简单的为每个参数梯度平方的累计值
动量法
用于梯度估计修正,在梯度下降的时候,常采用随机梯度下降,为了避免梯度不合理,采用平均值来处理当前梯度(防止梯度消失或爆炸)
原梯度为偏导数,通过加权移动平均更新为
自然,θ 作用于参数学习的话,如权重 w,下一个值即为
逐层归一化
再参数化的一种
归一化:即将模型的输入经过多一层处理,使之规范且合理
批归一化(批量归一化):针对神经网络中某一层中的单个神经元,对其输入进行归一化处理
层归一化:对神经网络的某一层的所有神经元进行归一化处理
网络正则化
记忆与注意力机制
All You Need Is Attention
注意力机制
全连接前馈神经网络的输入和参数太过庞大,每一层每一维都需要不同的参数参与,于是采用卷积前馈神经网络对参数的数量进行简化(权重共享、局部连接、汇聚),但这似乎还是不够
于是对于输入向量 X,我们采用注意力机制,即规定一个任务向量,规定需要直接作用于当前任务的维度,使神经网络重点处理和当前任务强相关的维度数据,这就是所谓注意力机制
无监督学习
自编码器
自编码器:是通过无监督的方式来学习一组数据的有效编码(或表示)
就是一个编码和解码的过程,其要学习的风险函数为编码再解码的差错率,设函数 f 为编码函数,g 为解码函数,则期望风险为
集成学习
集成学习概述
就是集合多个独立模型,取其“均值”作为最终的模型输出
AdaBoost 算法
求解各个模型的权值,并进一步通过权值和各个弱分类器(基分类器)构造一个强分类的算法
算法的基本思路是,在经过一次基本权重分配,更加注意分配错误率更高的弱分类器,适时的提高出错的弱分类器对应的权重,以此增加每个弱分类器的差距
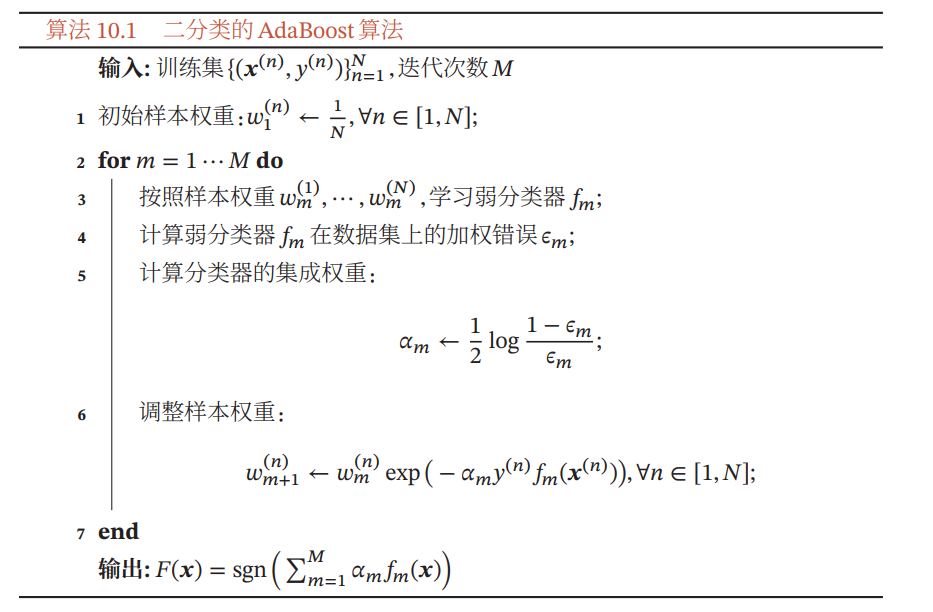
第一步:初始化各弱分类器权重,均分为 1/N
第二步:选取弱分类器 fm,并计算其加权错误 ε,通过公式为 fm 计算新的权重 αm(这取决于错误的大小,错误越大,集成权重越大)
在二分类模型中,最后的输出为 1/0,即判断是否是这一类,所以最后的强分类器 F 要加上一个 sgn 函数,表示其正负(大于 0 则输出 1,否则输出 0)
深度生成模型
生成模型概述
深度生成模型是一种特殊的模型,其目的在于随机生成可观测的数据(一个数据生成器)
变分自编码器
放了要不
再参数化(其实归一化属于再参数化的一种),就是将自变量用另一个函数的因变量表示,如对于函数 f(θ),其接收的输入为初始的 θ,现在我们对 x 进行这样的处理