主存储器
主存储器基本概念 主存储器构成和工作原理 改善存储器性能的途径
存储器概述
主存储器(内存)和辅存储器(外存),辅存储器在操作系统文件系统中讲解
考试重点,大题重灾区
存储器分类
主存储器
- RAM:SRAM / DRAM
- ROM:MROM / PROM / EPROM / EEPROM
其他存储器
- Flash Memory
- Cache
- 辅助存储器:磁盘、磁带、光盘
RAM(random access memory),随机存取存储器,储存单元内容可按需随意存取,速度与存储单元的位置无关,断电内容将会丢失(就是电脑内存)
根据存储信息不同,分为静态 SRAM 和动态 DRAM
关于 ROM
- MROM(mask read-only memory),又称掩模式 ROM,早期 BIOS 放在 MROM 中,其内容是烧录进去的,永远不能再改
- PROM,可编程只读存储器
- EPROM,可擦除只读存储器
- EEPROM,电可擦除只读存储器
按信息的存取方式,存储器可分为:RAM、ROM、SAM 和 DAM
按介质可分为:半导体、磁表面、磁心存储器和光盘存储器
按信息可保存性:易失性和非易失性
- 易失性即断电丢失,如 RAM
- 非易失性即断电不丢失:如 ROM、磁表面、磁心、光盘存储器
破坏性读出:读取的过程中破坏了原有信息形态
再生:如发生破坏性读出,需要立即重新写进去,这一过程叫做再生,典型的如 DRAM
存储器系统结构
存储器的三个重要指标:速度、容量和每位价格,速度越快,容量越小,价格越低,反之成立
存储器离 CPU 越近,容量越小,速度越快
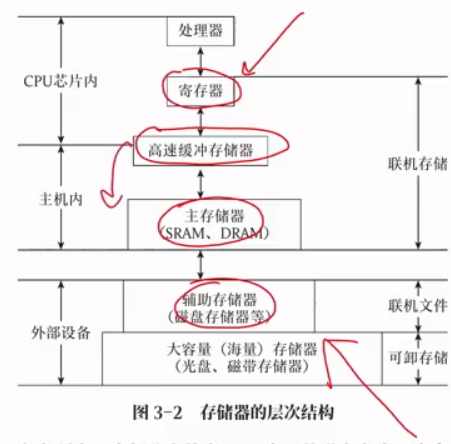
Cache-主存层次:通过硬件实现,解决内存速度和 CPU 速度的不匹配问题
主存-辅存层次:实现容量不足问题,其速度接近主存,容量接近辅存
半导体随机存储器和只读存储器
构成主存的半导体存储器分为 RAM 和 ROM
RAM 分为静态 S 和动态 D
ROM 根据可编程和可擦除分为 P、EP、EEP 和 FLASH
SRAM 工作原理
SRAM 存储单元使用双稳态触发器,即六管 MOS 管来记忆信息(0 或 1),通常用于做高速缓冲存储器
优点:其结构简单、稳定、可靠性高、速度较快,在读出时不会破坏原有结构,不需要再生
缺点:占用元件较多,占硅片面积大,功耗大,集成度不搞,同时 SRAM 还是易失性存储器(RAM 就这特点),断电将丢失
DRAM 工作原理
DRAM 存储单元有三管式和单管式两种,靠电容存储电荷的原理来寄存信息,即电容上有足够电荷表示 1,无电荷表示 0
优点:集成度更高,功耗低,价格便宜
缺点:因为是电容储存电荷,他的读出是破坏性的,需要进行重写;并且,即使不读,也会发生漏电,1-2ms 电荷也会消失,所以每 2ms 内都要进行一次恢复操作,速度较慢
因为需要不断恢复,速度低于 SRAM,一般用于主存储器
DRAM 刷新
刷新即每隔 2ms 的恢复操作,DRAM 刷新只与行地址有关,因为按行刷新
- 集中刷新:在 2ms 内专门开辟一断时间用于完成刷新,即停止读写进行刷新,整个存取周期分为读写阶段和刷新阶段两段,刷新阶段也称为内存的死亡时间
- 分散刷新:将整个存取周期分为若干个小周期,每个小周期分为读写阶段和刷新阶段,无死亡时间,但读写变慢了,因为相当于每个小周期的存取时间加倍了(刷新一次相当于存取一次)
- 异步刷新:类似于数据库表的行锁定,每行独立进行刷新和读写
DRAM 刷新有一下特点
- 刷新对 CPU 是透明的,不依赖于外部访问
- 按行刷新,只需要行地址
- 不需要选片,因为对所有片进行刷新
- 电容的读出是破坏性的并且电容会自动消散,DRAM 采用读出再立即写入的方式进行刷新
常用结论:RAM 通常用来存储的是应用程序,即正在被使用的程序和数据,可以随机读写(存取)
ROM 只读存储器
ROM 常用于存储系统程序和固件(出厂时写死的固化硬件,BIOS),断电信息不丢失
ROM
只能读,不能改
PROM
可编程只读存储器,可以改,但只能改一次,以熔丝的通和断表示 1/0,刚出厂全连通,可以根据自己需求烧断熔丝把 1 改为 0,显然断了之后就接不上了
EPROM
可擦可编程只读存储器,以浮动栅 MOS 电路保存信息,使用紫外线擦除,且为整体擦除
EEPROM
可电擦可编程只读存储器,可以局部擦除,重写次数有限,一般为 10 万次
FLASH Memory
快速读写存储器,最近的技术,俗称 SD 卡,在 EPROM 和 EEPROM 的基础上发展而来,以块为存储单位
正确说法
- FM 具有 RAM 功能
- FM 具有随机存取功能
错误说法:FM 是随机存储器,随机存储器特指 RAM,但 FM 结构上是 ROM
注意单独说 ROM 的时候,指的就是最原始的只读存储器,而不是其他
SRAM 和 DRAM
共同点
- 都属于 RAM
- 都属于易失性
| SRAM | DRAM | |
|---|---|---|
| 存储信息 | 触发器 | 点容 |
| 破坏性读出 | 否 | 是 |
| 需要刷新 | 否 | 是 |
| 行列地址 | 同时送 | 分两次送 |
| 运行速度 | 快 | 慢 |
| 集成度 | 低 | 高 |
| 发热 | 大 | 小 |
| 存储成本 | 高 | 低 |
如何记忆?因为电容储存
- 集成度高于 MOS 管
- 不连通电路,发热小
- 电容读出会消失,所以读出具有破坏性
- 电容会消散,需要刷新
- 刷新,速度就慢
- 慢,意味着便宜,成本就低
SRAM 反过来就行
注意 SRAM 和 DRAM 的易失性和刷新性区分:SRAM 和 DRAM 在不断电时,所存信息是不易失的;同时 DRAM 还具有刷新性,即使不断电,其信息也在不断变化
主存储器与 CPU 的连接和控制
CPU 和主存储器根据数据总线、地址总线还有控制总线进行连接
CPU 位/字扩展
位扩展
当芯片的计数单位小于主存的计数单位,同时计数数量相同
芯片的位扩展:指加大 CPU 字长,当芯片字长小于主存时,通过这种形式达到统一,如芯片字长为 64Kx1,主存位 64Kx8,这时就需要把每八个芯片的同一单元同时输送数据给主存
相当于把连续的 8 个芯片的同位置的计数单元串联,在选择到时统一输出
字扩展
芯片数据线位数等于主存数据线位数,但单元数量不够
芯片的字扩展:指通过加片的方式加大每个单位的单元数量,如 16Kx8 到 64Kx8,计数单元够但计数数量不够,于是将四片芯片视作一个单位,通过 2-4 译码器控制,达到 64Kx8 字
通过 2-4 译码器来选片,如 00 选择四片中第一片,01 选择第二片
位、字同时扩展
计数单元不够,计数数量也不够,注意一定先扩位,再扩字
片选信号的产生
使用高位的地址线去做片选的信号线,低位选择片内的具体单元,如 16Kx4 ——> 64Kx8,共四片,使用 A14/A15 作为片选信号线,A0-A13 作为单元信号线
如何界定这个高位的高?
首先要确定地址线,才能确定高位地址线
线选法
译码片选法(重合法)
对于 M x N 位的存储器,用 L x K 位的芯片
- M = L, K < N:位扩
- L < M, K = N:字扩
- L < M, K < N:位字扩,先扩位再扩字
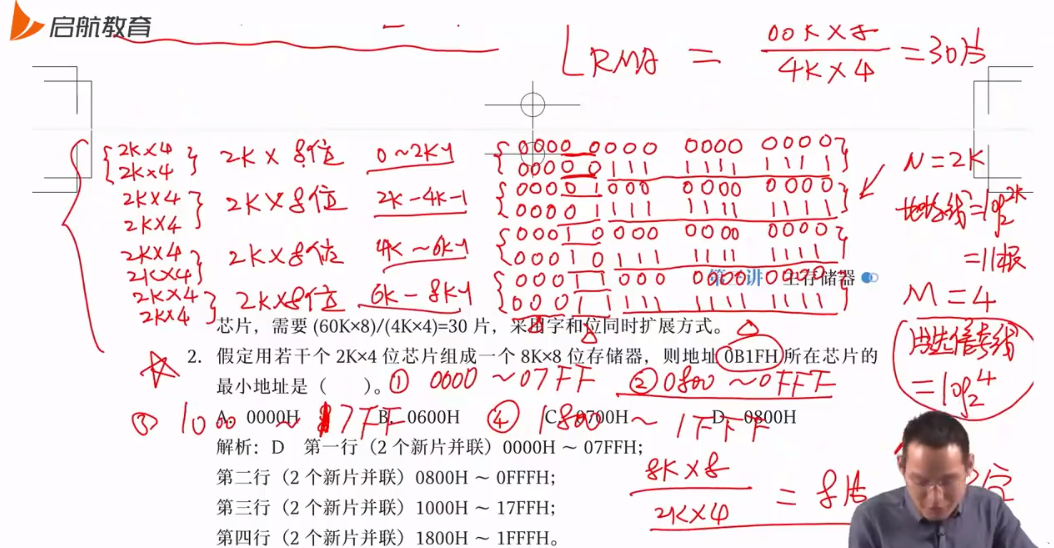
例题,用 2Kx4 位芯片组成一个 8K 位按字节储存的存储器
- 按字节储存,即位数为 8,即为 8Kx8 位的存储器
- 共需要芯片数量 n = 8x8 / 2x4 = 8 个
- 先位扩,使用两个芯片成一组,构成 2Kx8 位的芯片
- 再字扩,使用四组 2Kx8 位的芯片构成一个 8Kx8 位的存储器
字和位到底啥关系:字表示该芯片的地址长度,位表示每个地址位上二进制的大小。如 2x4K 位,即地址总长为 2K,每个地址上有 4 位二进制位
类比数据库表的横向纵向连接
- 在进行位扩展时,两个 2x4K 位扩展成 2X8K,这里实际上相当于数据库表的横向连接,即行数没变,但列数加倍
- 而字扩展就是在扩展行数,行数增加,而列数没变,但无论哪一种扩展,数据总量其实都在增加
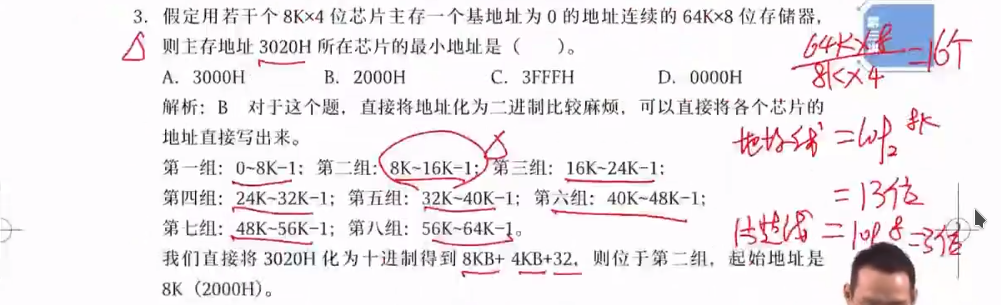
在上述又 2Kx4 位芯片组成的 8Kx8 位存储器中,地址 0B1FH 所在芯片的最小地址为:0800H
对于 NxM 的存储器(log 底数为 2)
- N 为每个芯片组的字长(地址长度)
- M 为存储器芯片的组数
如 2Kx4 组成的 8x8K 存储器,N = 2K,M = 4
| SRAM(线选法) | DSAM(重合法) | |
|---|---|---|
| 片内地址线个数 | log N | 1/2 log N |
| 片选线个数 | log M | log M |
一根线对应一位二进制,其中低位为片内地址线,高位为片选线,二者相邻,多出来的高位线充当读写线等
这里还注意一个问题,那就是这里的片选信号线个数是对外来说的,懂吗,就像 38 译码器,输入三根线,输出对应八种状态,这里也是一样,片选 3 跟线,对应 8 种输出,向内还要接 8 根线,这 8 根线就是芯片的地址线个数
更简单的判断地址的方法:将给出的 16 进制地址化为十进制,如 0B1FH 化为 十进制为 11x16^2 + 1x16^1 + 15 = 2847,在 2K~4K-1 之间,所以在第二片芯片组中,最低地址为 2K,即约为 0800H
请用第一道例题的解法解第(3)题
对于芯片本身:如一个 4Mx8 位的 DRAM 芯片,其数据线为 log8 = 3 根,地址线为 1/2 log 4M = 22/2 = 11 根
- 这里设计 DRAM 的地址线复用问题,需要除以 2,SRAM 则不用
对于 4Mx8 位的芯片
| DRAM | SRAM | |
|---|---|---|
| Data | 8 | 8 |
| Address | 11 | 22 |
| Read | 1 | 1 |
| Write | 1 | 1 |
| Slice | 1 | 1 |
在已知存储器大小,计算单个芯片存储大小时,注意位到字节的转化,实际上就是一个简单的除法运算,存储器大小除以芯片个数
大端编址和小端编址
操作数在存储器中的存放方式,常考难点
内存的计量方式:位、字节和字长
- 位即比特,1/0
- 字节即B,八个位
- 字(word),一个完整数据的比特数,字长是计算机一次操作处理的实际位数
端指开端,小端即以小地址开端,大端反之
小端编址:低位字节放在内存低地址端,高位字节放在高地址端
大端编址:低位字节放在高地址端,高位字节放在低地址端
- 注意不管哪种编址方式,内存编号都是从小到大进行编号
- 不管大端还是小端,字的编号永远是增加的,大端和小端关心的是一个字内该怎么编号
- 大端编址,一个字内从大到小存储;小端编址,一个字内从小到大存储
- 注意每个字节是不拆分的,视为一体,即一个地址
举例,当字长为 2 字节时,储存 if a > b,其中 if 为一号字,依此类推
- 小端存为
[if][ a][ >][ b] - 大端存为
[fi][a ][> ][b ]
编译器,代码,数组,结构体,字符串都以这种方式储存,即左边为低位,右边为高位
- 先按照 总数据长除以单个字长 分为 4 个字
- 每个字中按大小端排序储存
对于数字 0123456789ABCDEF H(十六进制),字长为 2B,其中 F 是最低位,0 是最高位,在给字编号时,从 F 开始,到 0 结束
- 第一个字 CD EF,第二个字 89 AB,第三个字 45 67,第四个字 01 23,在字中,数据又按字节进行分组(按照字节编址,一个字节一个地址)
- 小端为
[EF CD][AB 89][67 45][23 01] - 大端为
[CD EF][89 AB][45 67][01 23]
总结:数字从左往右是减小,代码从左往右是增大
- 机器码:操作码 + 操作值
- 一个十六进制数 = 四位二进制数 = 占 1/2 个字节数据
每个字找起始点都是从低地址位开始找,找到起始地址后,按照字长划分一个字出来,再在这个字内,按照低字节高字节进行大端小端排序
下一个字的起始点为上一个起始点+字长的地址
在计算大数的二进制时,如 7K,它并不是 2 的指数,采用 1k+2K+4K 的形式可得 1C00 H,约等于 1BFF H 而不是 1B00 H,注意在选项中选择最接近的一项
双端口 RAM 和多模块存储器
双端口 ARM 考纲已删掉,了解即可
双端口 RAM:给了两个端口可以同时进行进出,但当两个端口读相同地址时,会产生冲突
多模块存储器:最常用的提高存储器速度方案(希望和 CPU 速度相匹配),分为
- 单体多字存储器
- 多体低位交叉存储器
单体多字存储器
只有一个存储体,每个存储单元存储 m 个字,总线宽度也为 m 个字,每次存取,只获取一次存取单元的地址(首地址),然后顺序向后存取 m 个字数据
- 一般的存储器每存取一个字都要进行一次地址访问,即获取地址加寻址的过程,而这里将字的单位扩大了 m 倍
一旦遇到中断或者未按顺序存放的数据,就会出大问题
多体交叉存储器
就是把存储体分为很多模块,每个模块的容量和存取速度相同且拥有独立的读写控制电路、地址寄存器和数据寄存器,模块之间可以并行、交叉工作
多体高位交叉
高位交叉编址的多体存储器:高位存体号(存储体编号),低位存体内地址
每个存储体内部的编号是顺序的,如共三个存储体,M0 编号从 0 到 n-1,M1 从 n 到 2n-1,M3 从 2n 到 3n-1
- 能够在任意时刻,让不同请求源去请求不同存储体
- 非常比较扩展,加存储体就行
- 对于单个请求源并不能加快访问速度
- 较好满足局部性原理
读取 m 个字需要 r+(m-1)T+r 的时间

多体低位交叉
低位交叉编址的多体存储器:低位为体号,高位为体内地址
这里的编址采用交叉的方式,如三个存储体,M1 的编号按顺序为 0,3,6...,3n,M2 为 1,4,...,3n+1,M3 为 2,5,...,3n+2
- 在任意时刻能够让一个请求源同时请求不同存储体
- 不容易扩展,因为编号固定不好分
- 没有较好的局部性
利用流水线的方式读取,能有效提高带宽
在低位交叉编址中,体号 = 内存编号 % 存储体数
存取一个字的周期为 T,总线传送周期为 r,T+r 完成一次读取,若要实现流水线作业,要求交叉模块数量(体数)大于等于 m = T/r,m 又被称为交叉存取度
- 就是在第一个存储体开始工作的 T 的时间中(存取过程中),不断地去读取地址(传地址时间即为总线传送时间),耗时为 r
- 这样在第一个 T 后的每一个 r 过后,都会完成一次读取
读取 m 个字需要时间 r+T+(m-1)r+r
- 和分组交换的原理、计算方法一模吊样
但在实际过程中,会发生冲突,就是说在同一轮流水线中访问同一存储体是冲突的,不可以的
- 一道例题

带宽 = 数据量 / 传输数据
假设我们现在传输了 m 个字的数据,总长度为 64x8 位
- 若是顺序方式,即高位交叉,需要时间 mT
- 若是交叉方式,即低位交叉,需要 T+(m-1)r
这里政政解题的时候均省略了那两个小 r
于是顺序方式带宽为
交叉方式带宽为
主存-Cache系统
5星重点,出大题
CPU 速度远大于内存速度,导致内存成为性能瓶颈,双端口和多模块并不能很大程度上解决这一问题
Cache 概述
局部性原理
- 时间局部性:指令被执行后不久可能再次倍执行(大量的循环操作)
- 空间局部性:某个存储单元被访问,意味着它旁边的存储单元也很有可能被访问
在 CPU 和主存之间加一个容量较小的存储器,用于存放依据局部性使用频率较高的单元,这就是 Cache,在 CPU 读取时,先读取 Cache 内容,以此加快读取速度
- 实际工业中,Cache 利用率在 90% 以上
Cache 工作原理
在设计时,将主存和 Cache 分为大小相等的存储块(内存的存储块大小等于 Cache),自然 cache 的块数远小于主存的快数
cache 储存的是主存中最活跃的若干块的副本
Cache 由 Cache 存储体,地址映射变换机构和 Cache替换机构组成
- Cache 存储体:Cache 自身也是一个存储器,以块为单位和主存交换信息
- 地址映射变换机构:将主存地址映射为 Cache 地址
- 替换机构:当 Cache 内容已满,无法接受主存块的信息,就由 Cache 替换机构接管,确定应该移出 Cache 中的哪个块,同时将新内容移进 Cache
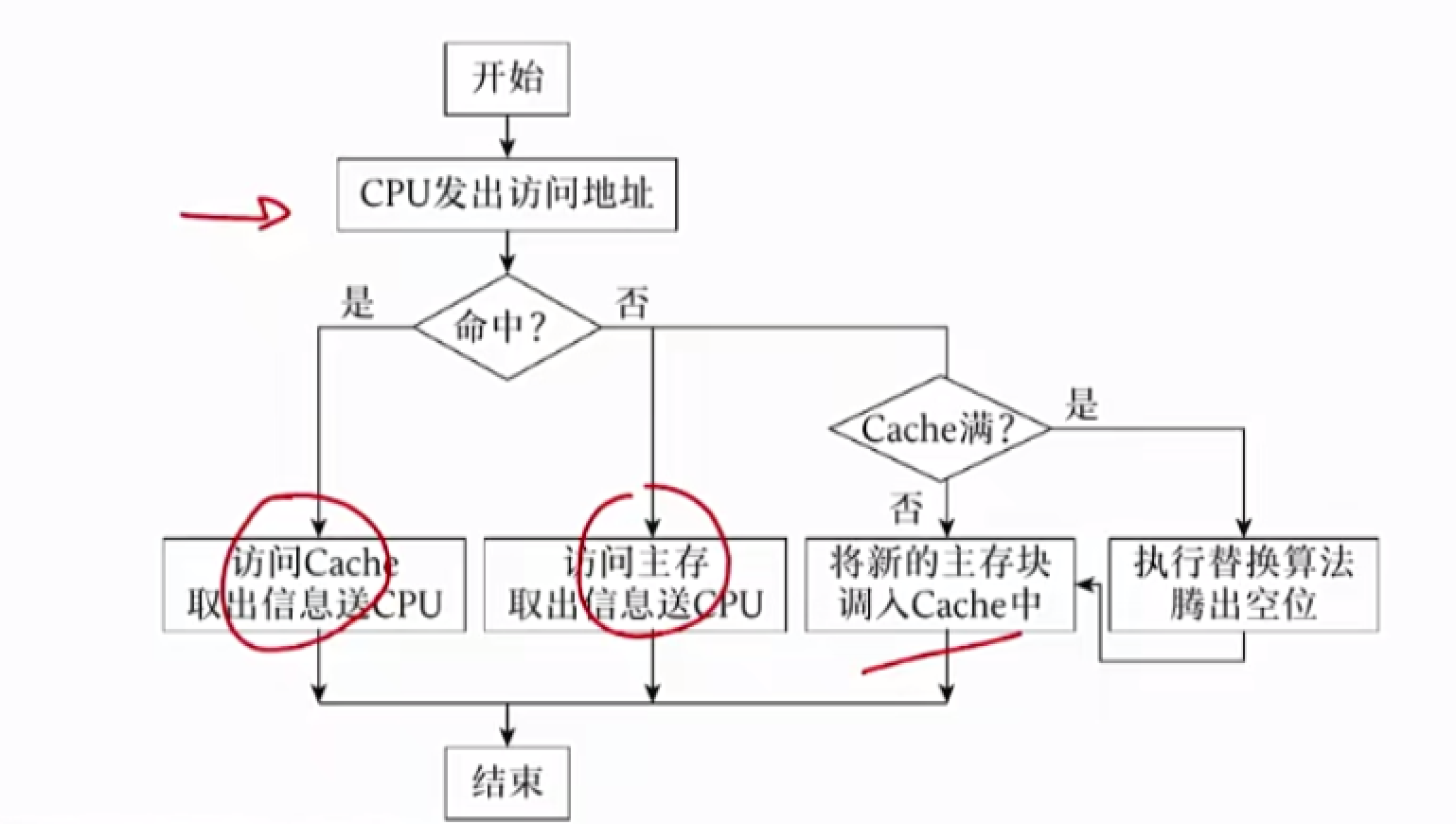
Cache 基本操作
即读写操作,其流程如下
- Cache 和主存的计算单位:块
- CPU 和主存交换的计算单位:字
这意味着主存和 cache 之间交换数据是整块整块交换,CPU 读取 cache 或主存数据是一个单元一个单元读的(一个单元一个字)
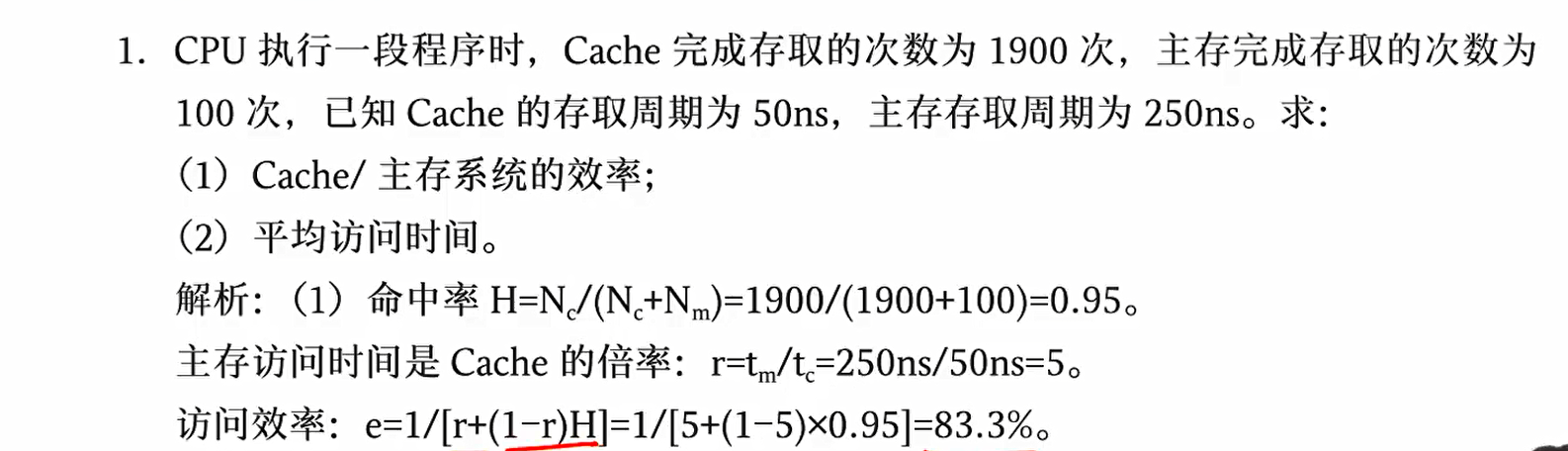
命中率,访问Cache的次数 / 访问Cache次数+访问主存的次数:H = Nc / (Nc+Nm)
当命中率固定,且主存和cache同时访问,有平均访问时间:Ta = H x Tc + (1-H)Tm
- 当不同时访问时为 Ta = Tc + (1-H)Tm
整个系统效率:e = Tc / Ta
- 先算 Ta 再算 e 一样的
一个内存单元的大小为一个字,一个块的大小基本单位为字,是字的整数倍,字长由机器本身决定,若未标明,默认为字节编码,即一个字为一个字节长度,8 个比特
主存和 cache 进行交换时,基本单位为块
Cache 和主存之间的映射方式
当要把主存块装在 Cache 时,选择 Cache 的规则
三种映射方式
- 全相联映射
- 直接映射
- 组相联映射
直接映射
就是 hash 散列
分块时,主存和 Cache 都有块号,i = j % C 或 i = j % 2^c
- i 为 cache 块号,j 为主存块号,C 为cache 块数,c 为 chche 块号的位数
- 一个 cache 块映射多个主存块,如当快数为 8,主存块 0 号和 8 号都映射到 cache 块 0 号
主存编号和主存块号不是一个东西,主存编号除以 2^b 得到主存块号,b 为快内偏移
地址结构:地址结构是生命线,必须记牢
- 主存地址格式:主存标记 + cache 块号 + 块内偏移
- cache 地址格式:cache 块号 + 块内偏移
直接映射特点:简单,效率不行
全相联映射
没有固定的映射关系,可以任意映射,主存块可以放在 cache 中任一位置
地址结构
- 主存地址结构:主存标记 + 块内地址
- cache 地址格式:cache 块号 + 块内偏移
特点:映射自由,管理困难
组相联映射
先将 cache 存储空间分成组,每组使用直接映射,组内使用全相联映射
在实际映射时
- 蒋版:模组数,通过主存块数 j 和 cache 组数 n 进行映射,将主存先映射到组 j % n,这一步和直接映射一模吊样,进行哈希散列
- 唐版:模的 cache 块数,不是组数,但考试中都考过,优先考虑蒋版,但要甄别
- 再在 cache 组内进行自由映射,即全相联映射
地址结构
- 主存地址格式:主存标号 + cache 组号 + 块内偏移
- cache 地址格式:cache 组号 + 块内偏移
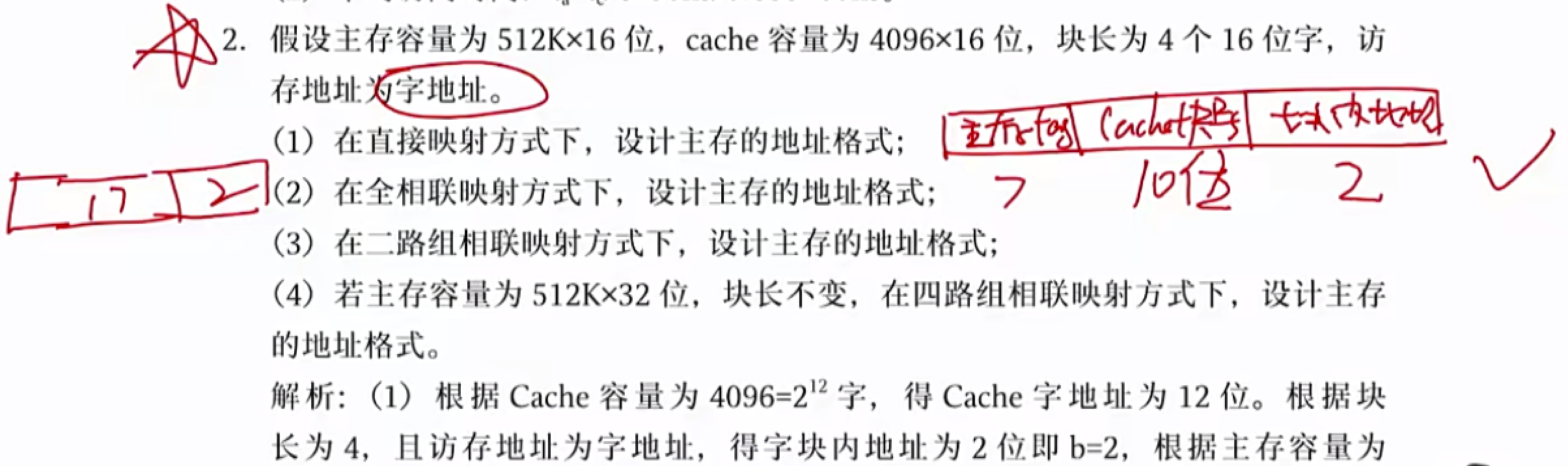
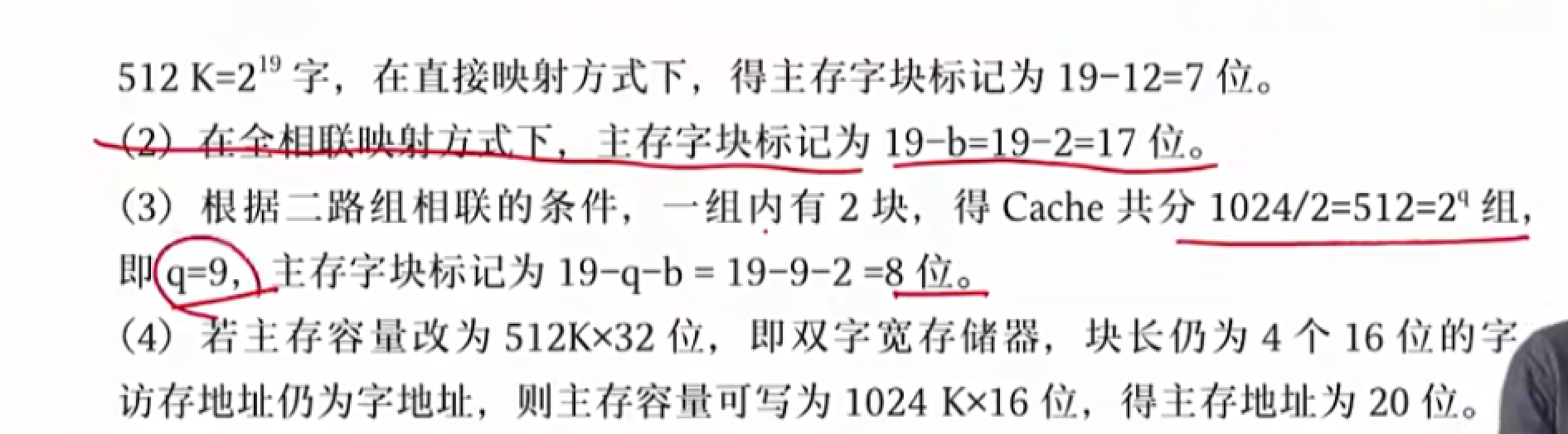
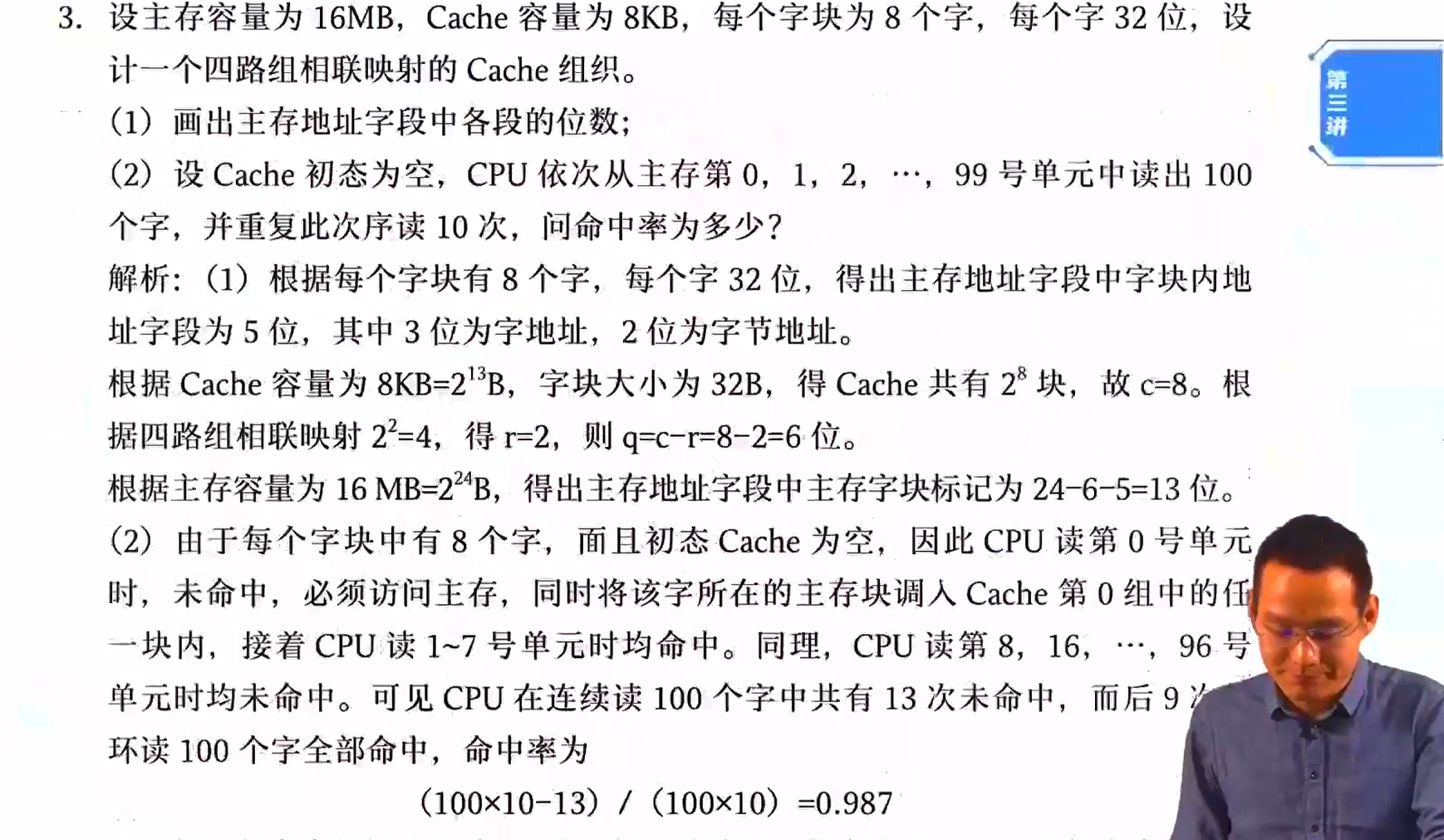
Cache 主存地址结构和大小计算
主存标记号 [块号/组号] 块内地址号
主存地址
直接映射主存地址结构:主存标记 + cache 块号 + cache 块内地址
全相联映射主存地址结构:主存标记 + cache 块内地址
组相联映射主存地址结构:主存标记 + cache 组号 + cache 块内地址
| 位 | 计算方法 |
|---|---|
| cache 地址位(直接) | log2 (cache 总容量) = cache 块号位 + cache 块内地址位 |
| cache 块号位 | log2 (cache 块数) = log2 (cache 总大小 / cache 大小) |
| cache 块内地址位 | log2 (cache 大小) |
| cache 组数 | cache 块数 / 组相连路数 = cache 总容量 / (块大小 x 组相联路数) |
| cache 组位 | log2 (cache 组数) |
| 主机标记位(直接) | log2 (主存总容量) - cache 地址位 = log2 (主存总容量) - cache 地址位 - cache 块内地址位 |
| 主机标记位(全相联) | log2 (主存总容量) - cache 块内地址位 |
| 主机标记位(组相联) | log2 (主存总容量) - cache 组位 - cache 块内地址位 |
- 这里的大小的单位均为字
举个栗子:计算地址格式
三种映射地址格式
- 直接映射:主存标记 + cache 块位 + 块内地址
- 全相联:主存标记 + 块内地址
- 组相联:主存标记 + cache 组位 + 块内地址
再举个栗子:组相联主存单元应装入的 cache 组号

- 组号 = 主存块号 % 组数,4 % 8 = 4,选 C
思考一个问题:不同的主存映射到同一 cache 时,cache 如何区分其映射的是哪一个主存
答案:依靠主机标记位,在地址格式计算时,已经给主机标记分配了log2(主存总容量)-组/块位-块内地址位的位数用以区分映射到相同 cache 中的不同主存块
- 先找块号,再找标记
缓冲地址
Cache 地址结构:Cache 组/块号 + Cache 块内偏移
Cache 组织结构:Cache 标记 + Cache 块内地址
- Cache 标记分为:主存标记位(和主存地址中的保持一致)、有效位(1位)、脏位(1位)、替换算法位(取决于替换算法)
直接映射的访问过程:
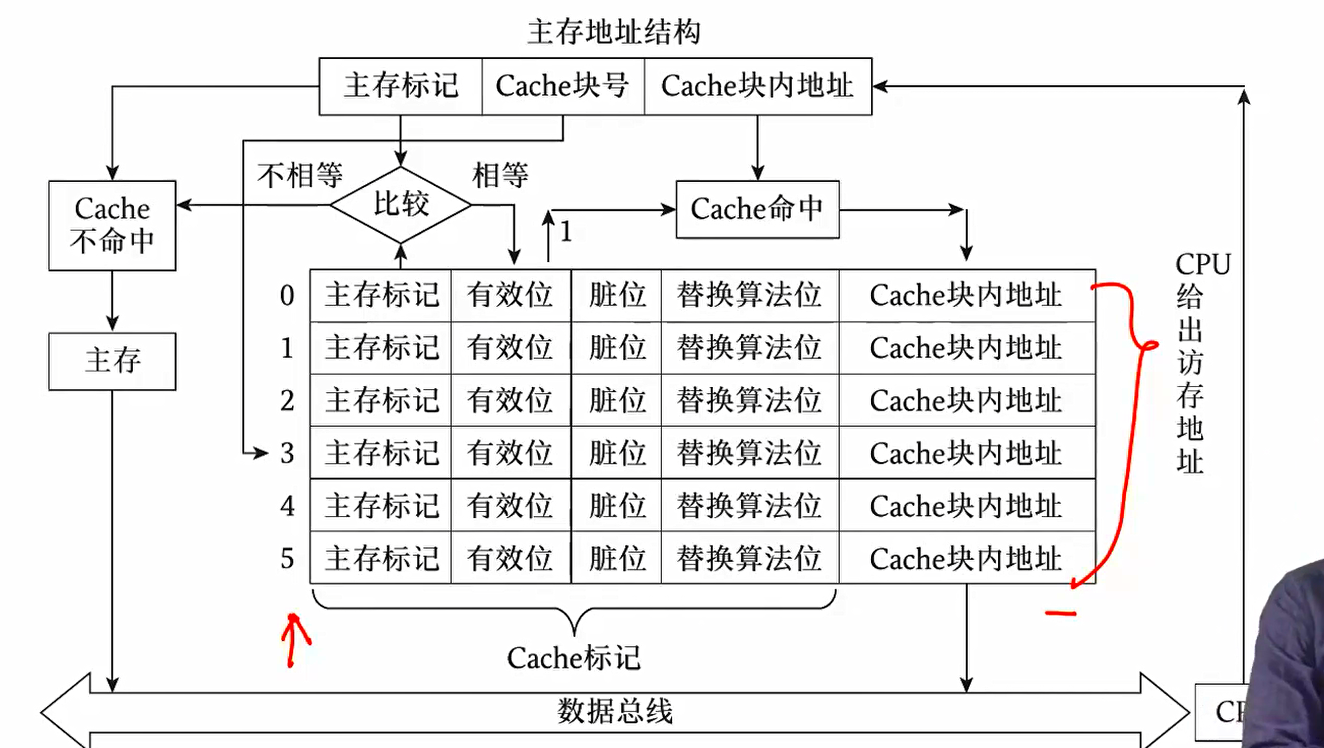
- 这个东西也叫地址变换表,一个缓冲块对应一行,即包含缓冲块个数个存储单元
Cache 地址中并不记录块号,cache 块相当于一个数组,其下标即为块号,CPU 通过主存地址的 cache 块号去找 cache 数组下标,访问 cache 块,再比较主存标记,若相同,则命中,直接读取该 cache,无需再访问主存
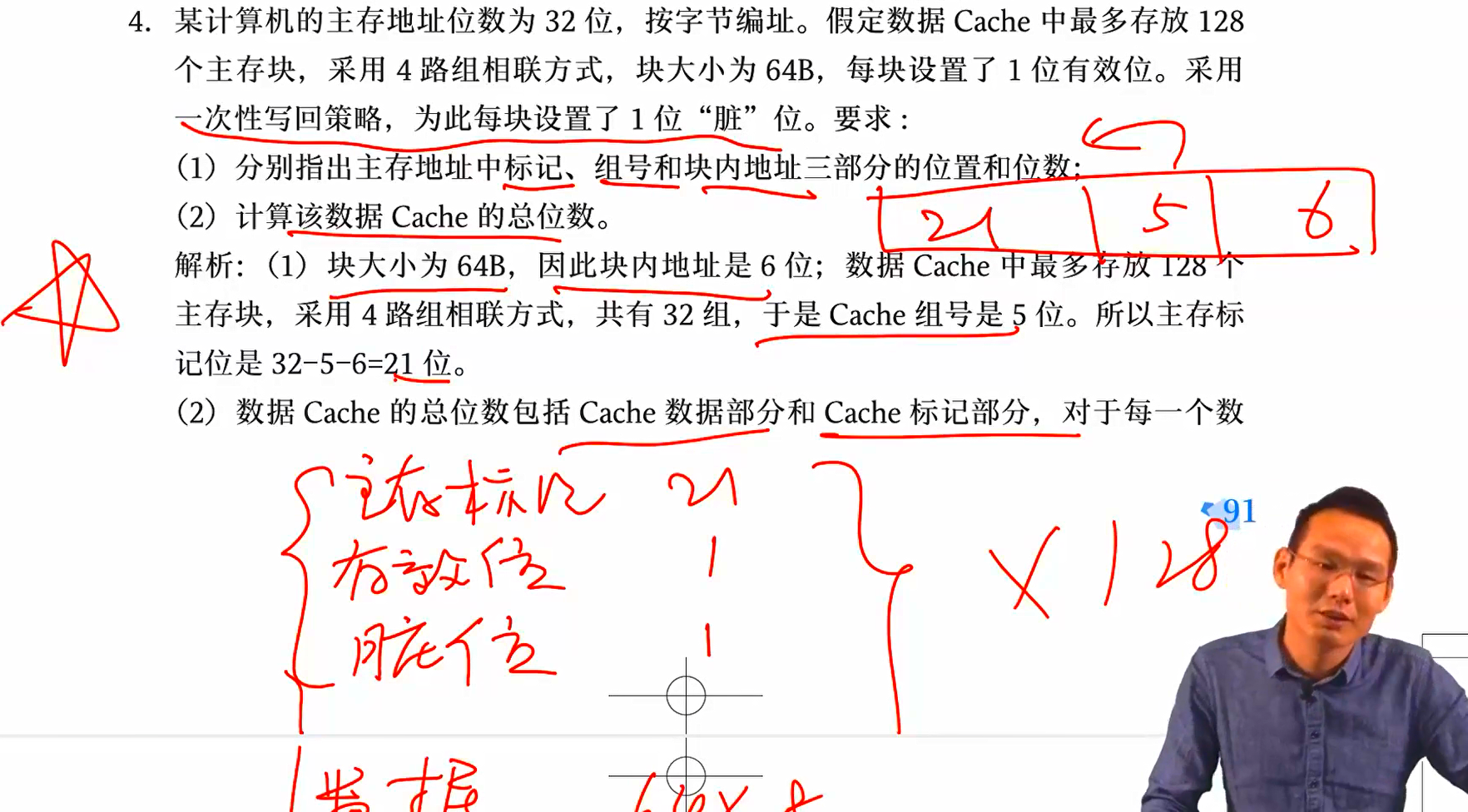
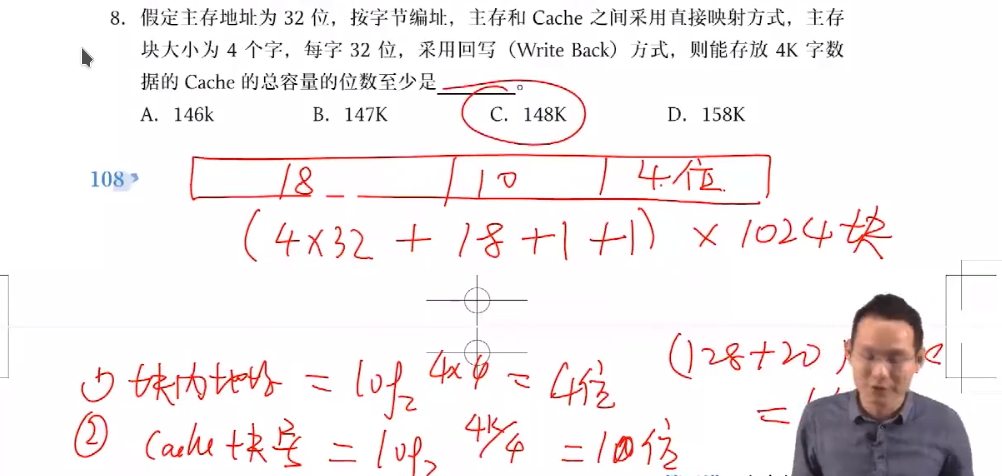
同时可以得知,Cache 大小计算方式是:
其中
- cache 数据位实际上就是块内地址大小
- 只有使用回写法才有脏位,为 1 位,写直达法不需要
- 按字节编码,即 8 位一个字,编号时的基本单位是字
- 不同的映射策略的替换算法位不同
- 直接映射:无替换算法位
- 组相联映射:log2(N),N 为 N 路组相联的 N
- 全相联映射:log2(M),M 为 cache 块数
栗题
组相联映射的访问过程
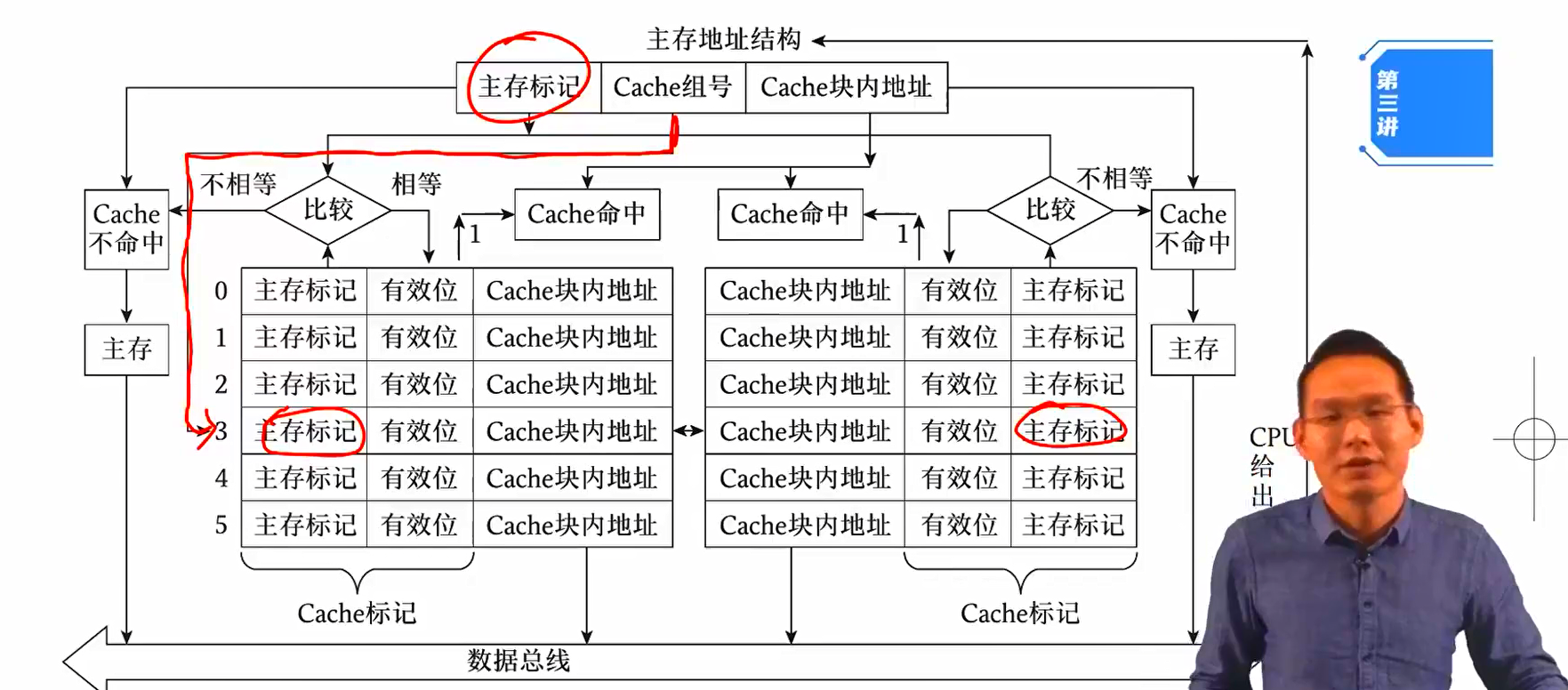
CPU 通过主存地址中的组号确定 cache 组,在该组中遍历比较主机标记,若相同且有效位为 1,则命中,直接读取该 cache;若未命中,则将主存中对应内容写入该 cache,再读取;若 cache 已满,则使用 LRU 算法写入
全相联的访问过程
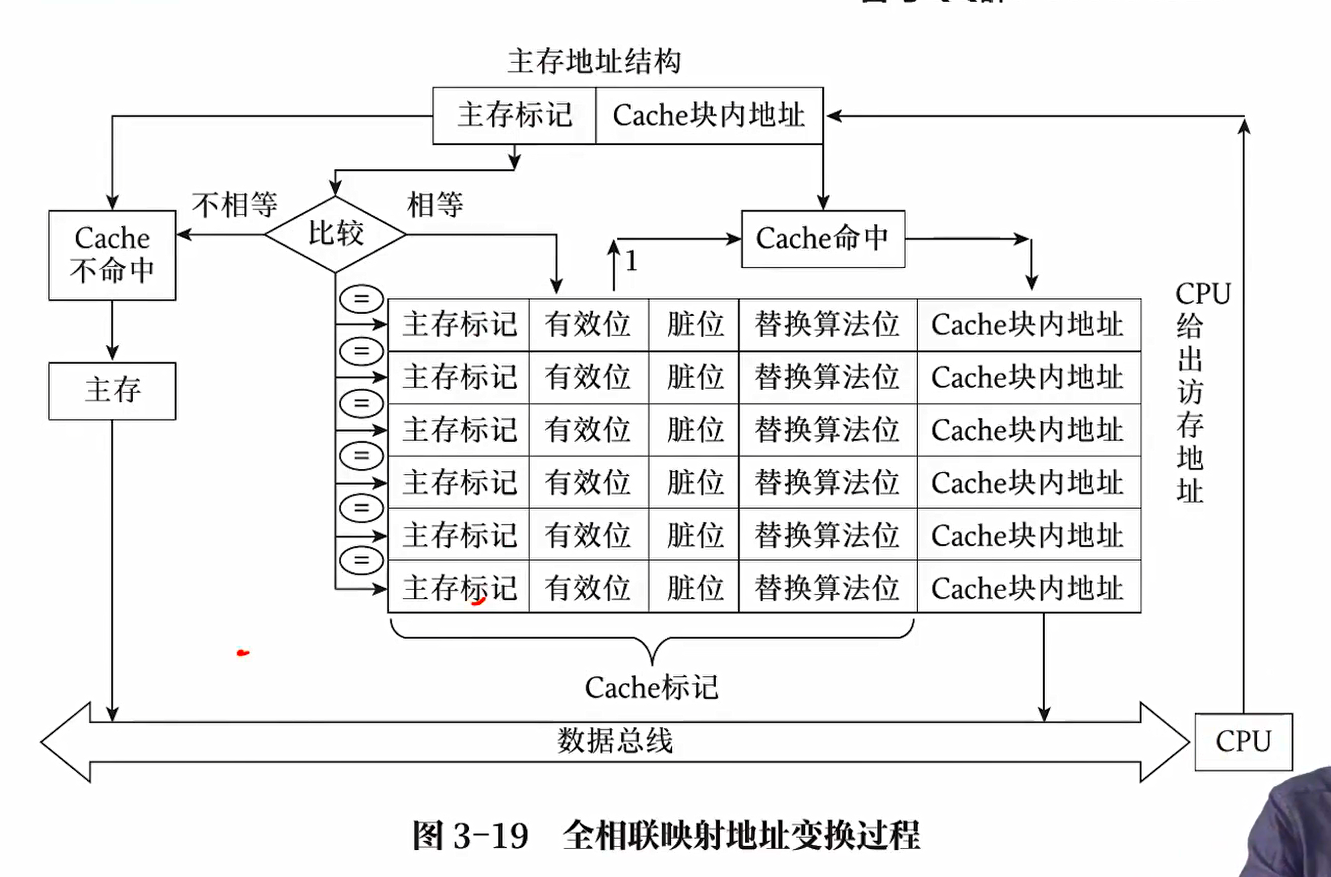
将主存地址解析为主存标记和块内地址,让主存标记和所有的 cache 的主机标记进行比较,这种方式叫做按照内容进行查找,主机标记相同则命中
如何区分三种映射方式?
主存地址分为两部分,一定是全相联映射。若是三部分,若一个组/块号对应单个 cache,则为直接相联,否则为组相联映射
举个栗子:计算 cache 地址总容量
- 通过主存地址的标记确定 cache 地址的标记位数
- 加上有效位和脏位
- 加上块内地址(和主存块内地址保持一致)
- 乘上需要 cache 的块数,即总数据量除以单个块数据量
一些栗题
例题一:单元到块,块到字,字到位的转化
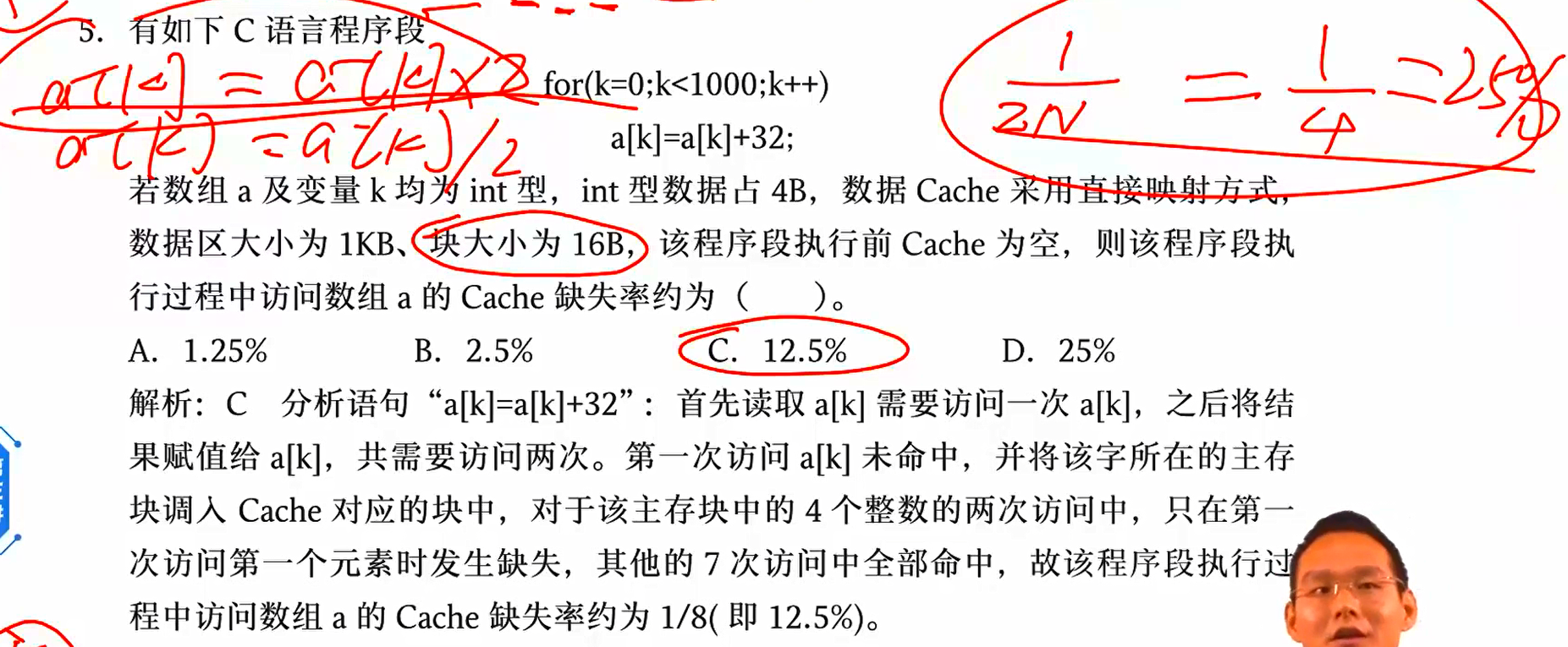
例题二:每一块不命中一次
注意 a[k] = a[k] +32 这一过程访问了两次地址 a[k],第二次一定命中
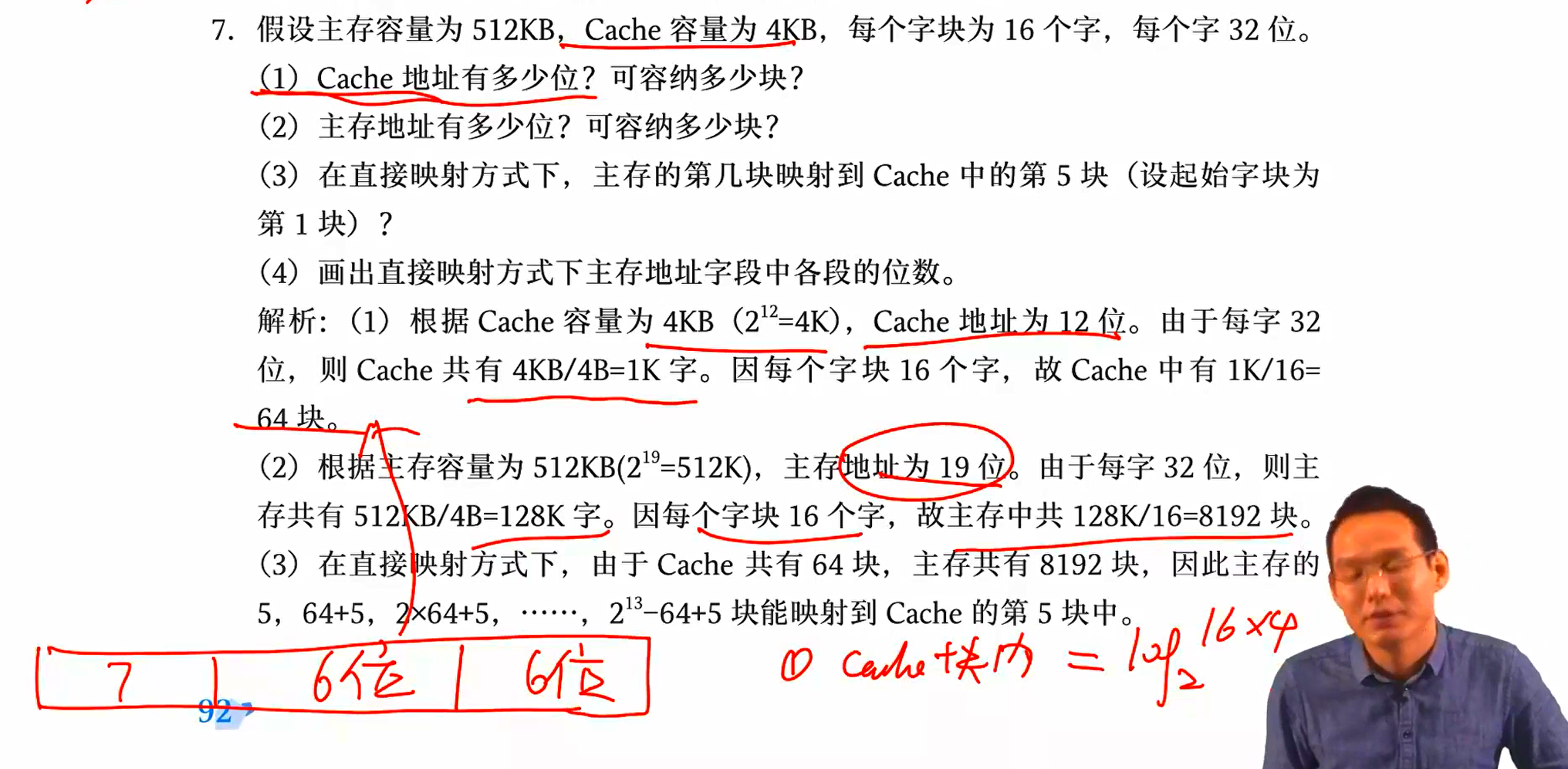
例题三:容量到块、字的转换
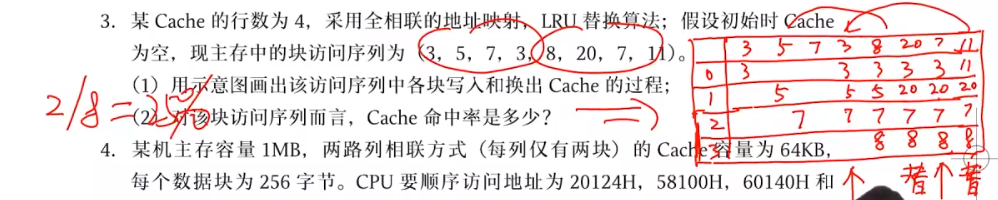
例题四:全相联映射的访问
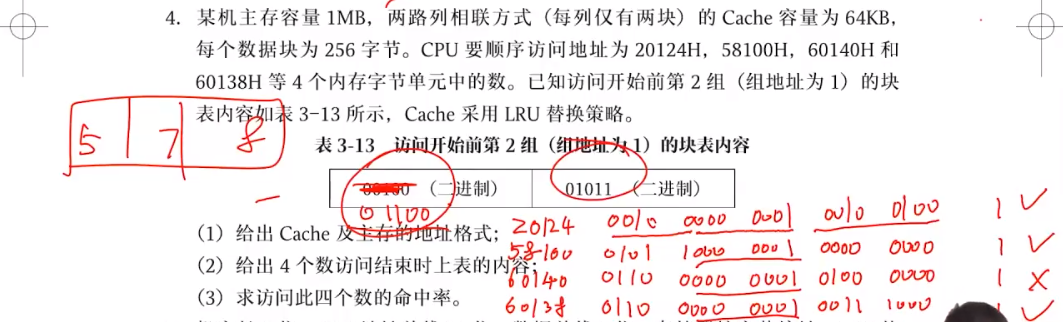
例题五:根据主存地址结构进行组相联映射访问
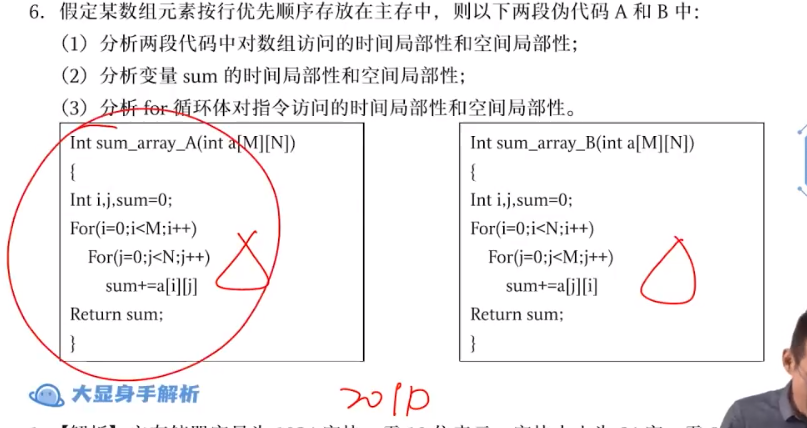
例题六:时间、空间局部性在代码上的表现
- 数组按行访问,沿着地址顺序访问符合时空局部性
- 而按列访问将降低读取效率
- sum 具有好的空间局部性,因为只有一个变量不断访问
Cache 替换策略和更新策略
替换策略
主存不断往 cache 中映射,总会塞满,当满了之后需要对旧的数据进行替换
- 随机替换:简单,没依据局部性原则,命中率低
- 先进先出算法
- 近期最少使用算法:LRU 算法,最常使用
- 最不经常使用算法
类似于虚存调页
写策略
更新策略
对 cache 块内的数据进行修改
- 写直达法:主存和 cache 完全同步,二者任一修改后,另一马上跟着修改
- 回写法:更新 cache 后,不立即写入主存,使用标志位(一致性)标识 cache 是否更新过,即版本领先主存,在替换时再更新主存
回写则有脏位
虚拟存储器系统
与操作系统交叉,单靠组原不太好学
概述及工作原理
主存-cache系统解决 cpu 和内存的速度问题,虚拟存储器系统解决内存大小问题
虚拟存储器由主存储器和辅助存储器联机工作共同组成,在逻辑上是一个统一的存储器
- 虚存空间:逻辑地址
- 主存空间:物理地址,容量为主存容量
- 辅存空间:对应辅存地址
工作原理:将主存和辅存地址空间统一编址,形成一个统一的存储空间,用户在这个逻辑地址中自由编程
- 逻辑地址远大于物理地址
操作系统先把程序和数据送入磁盘(辅存),再将当前所需的部分调入主存(将虚地址转化为实地址),供 CPU 使用,暂不使用的放在磁盘中,将磁盘当作主存的后备队列,将当前活跃的送入主存工作
实现方法
虚拟存储器分为以下几种,在组原中仅要求掌握页式虚拟存储器
- 页式虚拟存储器
- 段式虚拟存储器
- 段页式虚拟存储器
页式虚拟存储器的实现方法:将进程的逻辑空间分为若干大小相等的片,称为页,以 0 开始编号,在内存空间中,同样以这种形式及大小进行分片并编号,注意在内存中每片均是单例,为进程所共用,进程之间相互独立,也就是说有多个进程第 0 片,但只有一个内存第 0 片
逻辑空间中的每个页可装入主存中不同的实际块中,在划分时就已经规定,页内地址和块内地址是同样大的
- 逻辑地址 LA:页号 + 页内地址
- 物理地址 PA:实页号 + 页内地址
- 缓存地址 CA:标记 + 块号/组号 + 块内地址
其中物理地址和缓存地址的长度一样,逻辑地址和物理地址长度不一,其映射关系储存在页表中
不变特征:因为页内地址一样,逻辑地址到物理地址的映射实际上只有前面的页框号,页内地址直接拼接上即可,同理,这里的低位业内地址也会原封不动的从物理地址映射到缓存地址
每个进程中,都维护有一张页表存放页号和块号的对应关系,页表寄存器存放页表始址和页表长度,收到 CPU 发来的逻辑地址后,先比较页号和页表长度,若超出则中断,若不超出,则用页表始址加上页号在页表中查找其对应的物理块,再去物理块上存取数据
进程(CPU)去查找慢表是相对简单的
高速缓冲存储器 TLB
快表
在主存系统中,除了 TLB 和 全相联 cache 按内容访问,其余均按地址访问
页表储存在内存中,这意味着 CPU 读取一次数据需要访问两次主存,这会造成极慢
解决办法:基于局部性原理,用一个高速缓冲存储器(往往是寄存器),称为快表,存储页表中经常使用的部分,避免多次访问内存
CPU 会优先查找快表,如果找不到再找页表(慢表),访问数据后再更新快表
- 如何根据虚地址找对应的 TLB?TLB 如何跟虚地址进行映射?
借用 cache 来实现
逻辑地址地址结构:映射均为虚地址
- 直接匹配模式:标记 + TLB 编号 + 页内地址
- 全匹配模式:标记 + 页内地址
- 组匹配模式:标记 + TLB 组号 + 页内地址
快表(TLB)和页表的组匹配等实现物理地址到逻辑地址的映射,Cahce 通过组相联等实现物理地址到 cache 地址的映射,二者映射的实现技术点是一样的
- CPU 先根据进程的虚地址去查他的实地址,通过 TLB 的全匹配、直接匹配、组匹配或查询页表
- 找到实地址后,再通过主存-Cache系统找到所需要的数据,这一过程需要使用到 cache 的组相联映射、直接相连或全相联
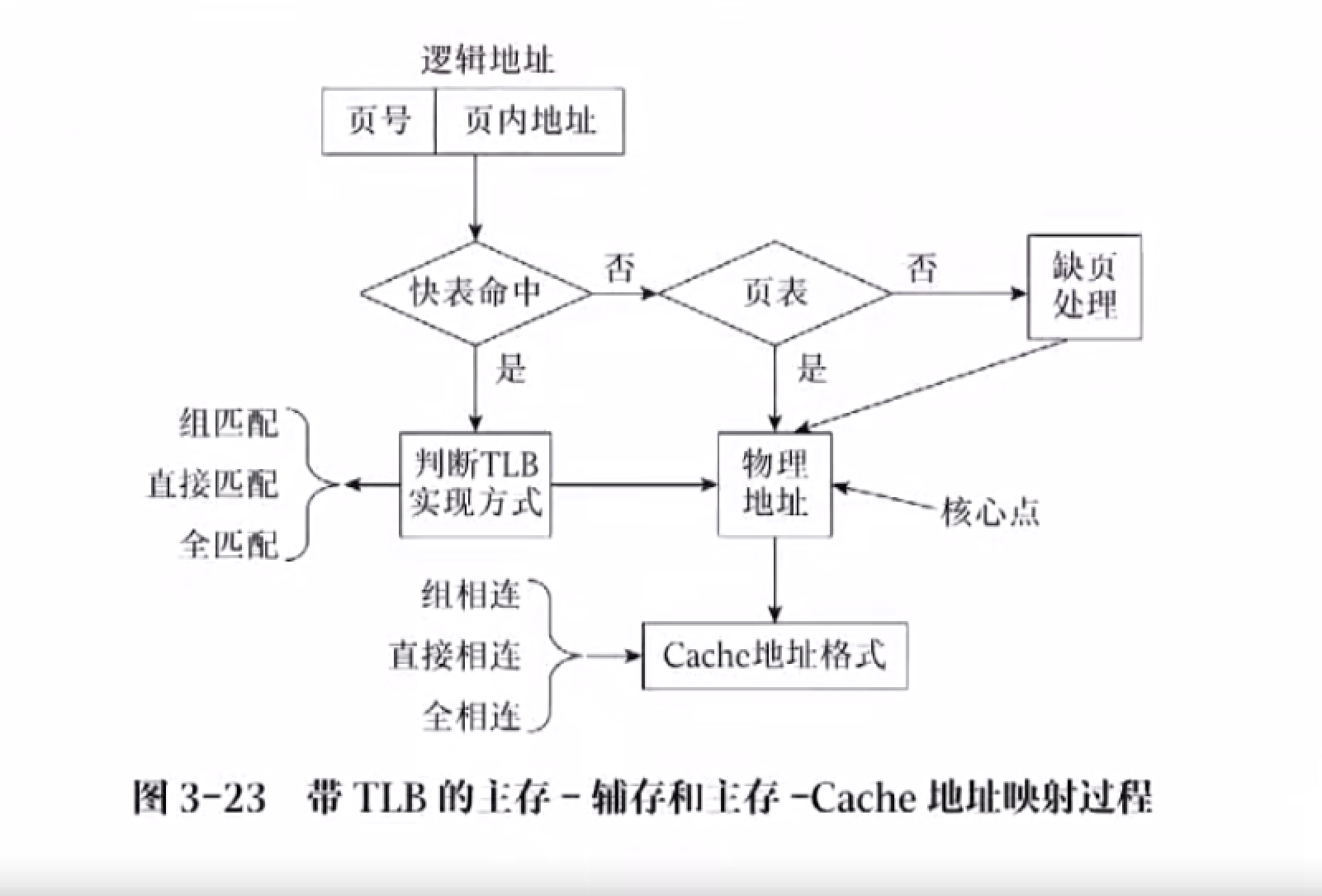
一个完整的映射过程:先从虚地址映射到物理地址,再根据物理地址映射 cache 地址
- 寻找虚地址为 0008 C040H 的数据,并判断是否命中 cache
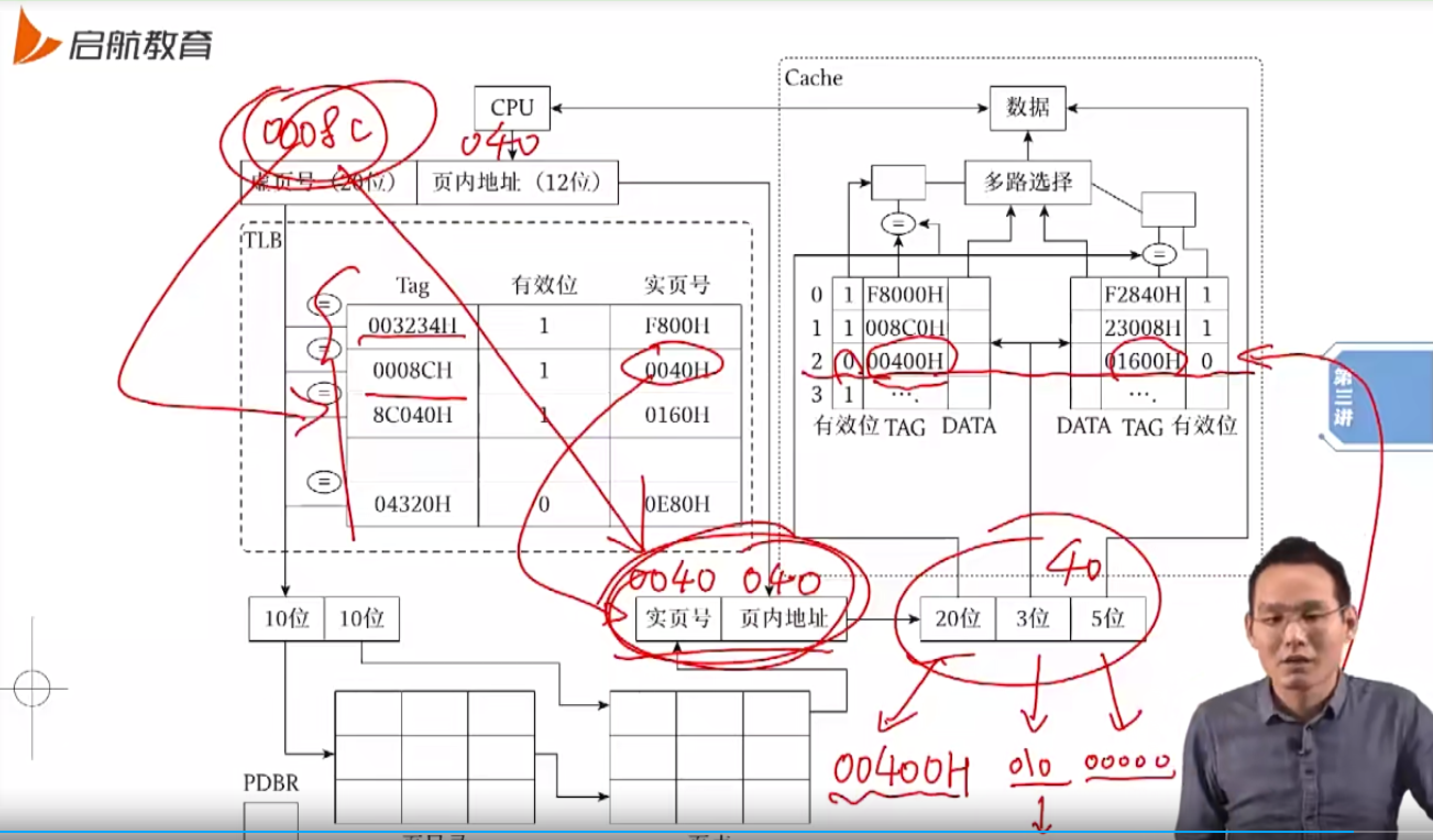
确实在 cache 中找到了对应数据,但因为有效位为 0,故未命中
虚拟存储器和 Cache 的异同点
1、cache 解决主存和 CPU 速度差异;虚拟存储器弥补主存和辅存的容量差距
2、cache 传输数据的基本单位为块,较小;虚拟存储器以页为单位,长度为几百~几百K字节
3、CPU 和 cache 以及主存都有直接访问的通道;而 CPU 和辅存之间没有,必须通过主存调块
4、cache 存取信息的过程均由硬件实现,对程序员是透明的;而虚拟存储器依赖于操作系统的存储管理软件,对系统程序员并非透明
地址结构是生命线